Объект: Wheel1D
Библиотека: Car
Имя на уровне решателя: Car.Wheel1D
Аннотация: Идеализированная модель контакта колеса с грунтом
Обозначение: 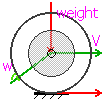
№ |
Обозначение порта |
Тип |
Наименование порта |
|---|---|---|---|
1 |
Port1 |
base.DOF1 |
1D механический порт, вращательная степень свободы |
2 |
Port2 |
base.DOF1 |
1D механический порт, поступательная степень свободы |
3 |
Port3 |
base.DOF1 |
1D сигнальный порт, весовая нагрузка |
4 |
Port4 |
base.DOF1 |
1D сигнальный порт, значение тангенциальной силы |
№ |
Параметр |
Тип |
Описание |
Значение по умолч. |
|---|---|---|---|---|
1 |
I |
base.real |
Момент инерции колеса, кг*м^2 |
1.15 |
2 |
RollingResistance |
string |
Тип сопротивления качения [Force, Factor, Loss] |
Force |
3 |
Table |
base.real |
Таблица значений функции Force(V), Factor(V) или Loss(V,weight) |
ImportData |
4 |
r |
base.real |
Радиус колеса, мм |
290 |