Модель: SNSRA1D
Библиотека: Mechanics1D
Имя на уровне решателя: TSIG4
Аннотация: Датчик относительного ускорения
Обозначение: 
№ |
Обозначение порта |
Тип |
Наименование порта |
|---|---|---|---|
1 |
Port1 |
base.DOF1 |
1D механический порт, 1-й узел (положительный) |
2 |
Port2 |
base.DOF1 |
1D механический порт, 2-й узел (отрицательный) |
3 |
Port3 |
base.DOF1 |
1D сигнальный порт, сигнал |
№ |
Параметр |
Тип |
Описание |
Значение по умолч. |
|---|---|---|---|---|
1 |
K |
base.real |
Коэффициент масштабирования выходного сигнала, _ |
1 |
Результаты тестирования
www.laduga.com
Глава 1. Заданные параметры теста
Название тестируемого компонента
SNSRA1D
Модуль тестируемого компонента
Mechanics1D
Дата тестирования
Thu Mar 12 18:00:01 2026
Результат
OK
Глава 2. Схема тестируемого объекта
Модель элемента с управляемым источником ускорения и датчиком относительного ускорения
Модель предназначена для анализа работы датчика относительного ускорения в системе с механическим объектом (массой),
движение которого формируется управляемым источником ускорения.
На объект воздействует управляемый источник ускорения, формирующий ускорение в соответствии с внешним управляющим сигналом
(в данном случае по синусоидальному закону). Под действием ускорения изменяются скорость и перемещение объекта.
Основное внимание в модели уделяется датчику относительного ускорения.
Датчик измеряет разность ускорений между элементами системы и формирует выходной сигнал,
пропорциональный измеряемому ускорению с учётом коэффициента масштабирования.
Сигнал датчика позволяет анализировать динамику движения объекта.
На его основе можно получить не только ускорение, но также определить скорость
и перемещение объекта, выполняя интегрирование сигнала во времени.
Таким образом, датчик относительного ускорения позволяет контролировать основные
параметры движения системы: ускорение, скорость и перемещение.
Параметры модели
C — коэффициент смещения сигнала источника ускорения,;
C = 0.0
M — коэффициент пропорциональности управляющего сигнала, кг (или кг·м);
M — масса объекта, кг;
M = 0.5
K — коэффициент масштабирования выходного сигнала датчика;
K = 1
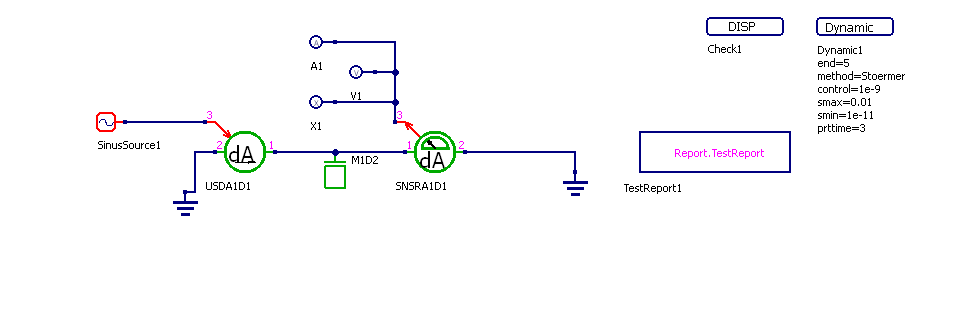
Рисунок 1 - Схема теста
Глава 3. Графики результатов теста
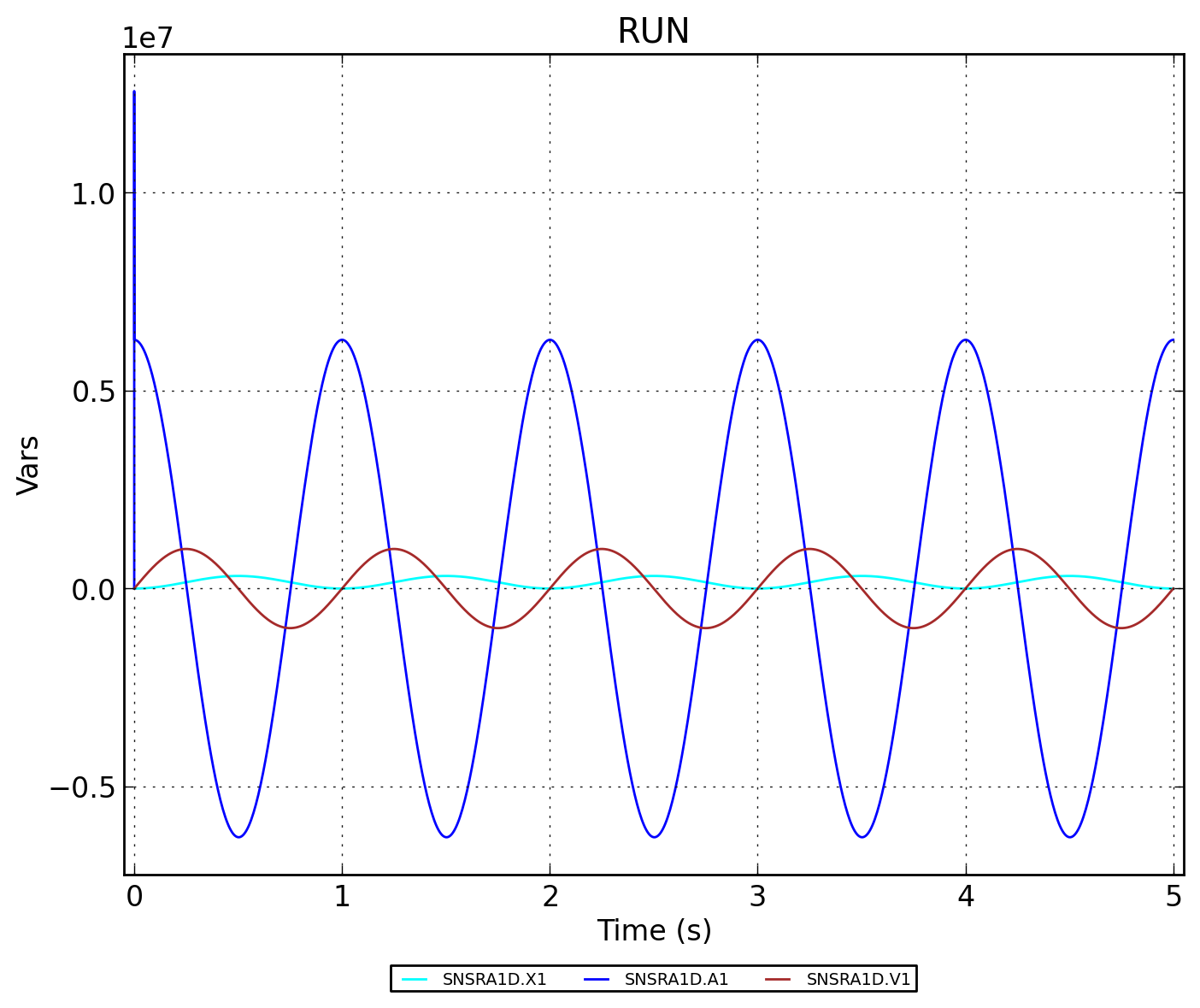
Рисунок 2 - SNSRA1D.RUN
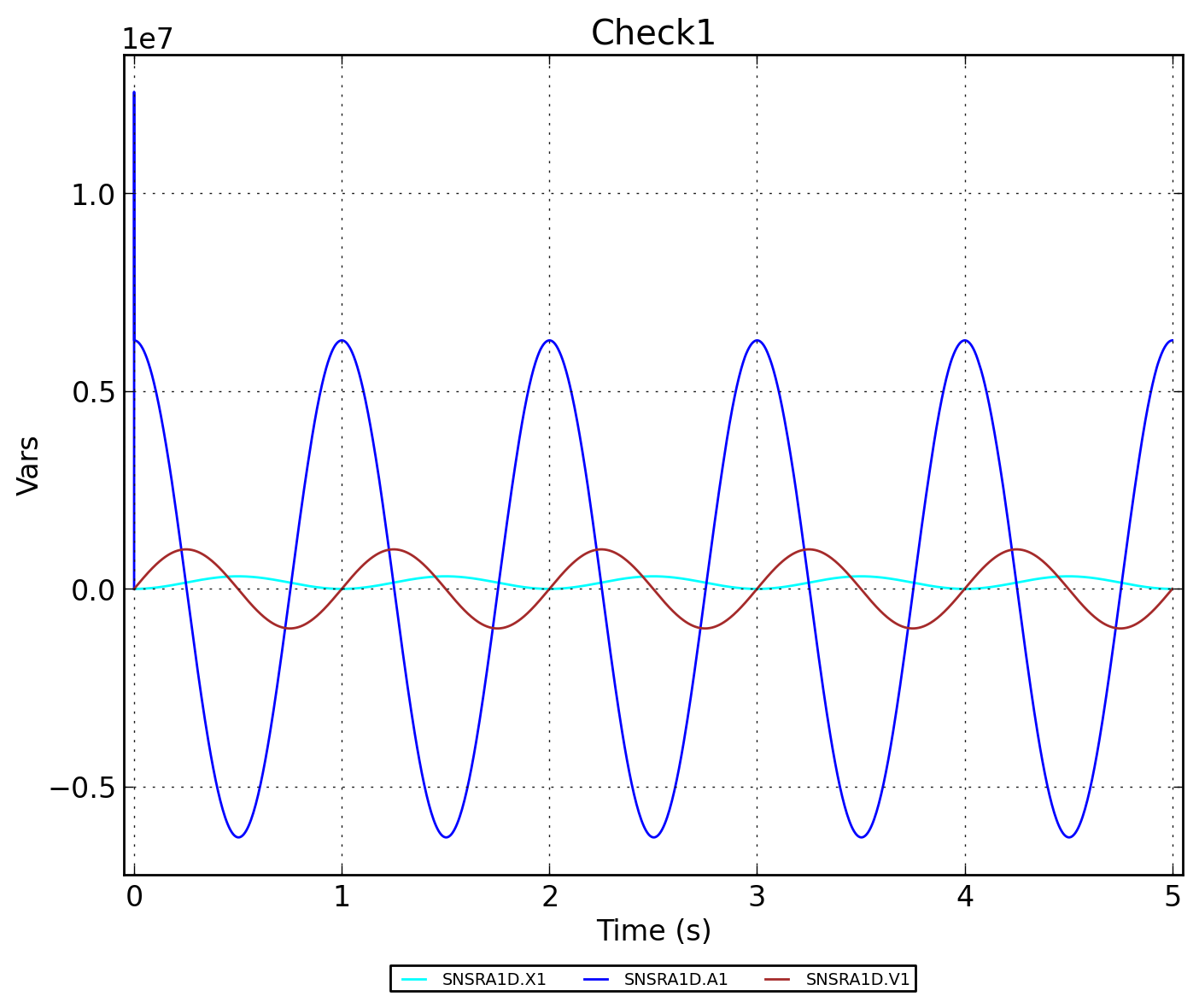
Рисунок 3 - SNSRA1D.Check1