Модель: SNSRX1D
Библиотека: Mechanics1D
Имя на уровне решателя: TSIG3
Аннотация: Датчик относительного перемещения
Обозначение: 
№ |
Обозначение порта |
Тип |
Наименование порта |
|---|---|---|---|
1 |
Port1 |
base.DOF1 |
1D механический порт, 1-й узел (положительный) |
2 |
Port2 |
base.DOF1 |
1D механический порт, 2-й узел (отрицательный) |
3 |
Port3 |
base.DOF1 |
1D сигнальный порт, сигнал |
№ |
Параметр |
Тип |
Описание |
Значение по умолч. |
|---|---|---|---|---|
1 |
K |
base.real |
Коэффициент масштабирования выходного сигнала, _ |
1 |
Результаты тестирования
www.laduga.com
Глава 1. Заданные параметры теста
Название тестируемого компонента
SNSRX1D
Модуль тестируемого компонента
Mechanics1D
Дата тестирования
Thu Mar 12 18:02:25 2026
Результат
OK
Глава 2. Схема тестируемого объекта
Модель элемента с управляемым источником скорости и датчиком относительного перемещения
Модель предназначена для анализа работы датчика относительного перемещения, из сигнала которого определяется
скорость движения
объекта в системе с механическим объектом (массой), движение которого задаётся управляемым источником скорости.
На объект воздействует управляемый источник скорости, формирующий движение в соответствии
с внешним управляющим сигналом (в данном случае по синусоидальному закону).
В результате воздействия источника объект начинает перемещаться,
а его движение определяется величиной задаваемой скорости и инерционными свойствами массы.
Основное внимание в данной модели уделяется датчику относительного перемещения.
Датчик измеряет разность перемещений между двумя точками механической системы — подвижным объектом и опорной точкой.
Полученный сигнал перемещения используется для определения скорости движения,
которая вычисляется как изменение перемещения во времени.
Таким образом, датчик позволяет не только контролировать относительное положение элементов системы,
но и получать информацию о скорости движения объекта, анализируя динамику изменения перемещения.
Модель позволяет проверить корректность работы датчика, измеряющего относительное перемещение,
а также убедиться, что на основе его сигнала можно определить
скорость движения объекта при воздействии управляемого источника скорости.
Параметры модели
C — постоянная составляющая скорости, м/с;
C = 0.0
K — коэффициент пропорциональности управляющего сигнала, м/с;
K = 1.0
Mu — внутренняя вязкость источника, Н·с/м;
Mu = 1.0·10⁻9
M — масса объекта, кг;
M = 0.5
K — коэффициент масштабирования выходного сигнала датчика,;
K = 1
Элементы модели
Управляемый источник скорости — формирует скорость движения объекта в соответствии
с управляющим сигналом
Масса — механический объект, движение которого формируется источником скорости
Датчик относительного перемещения — измеряет разность перемещений между объектом и опорной точкой системы;
по изменению этого сигнала во времени определяется скорость движения объекта
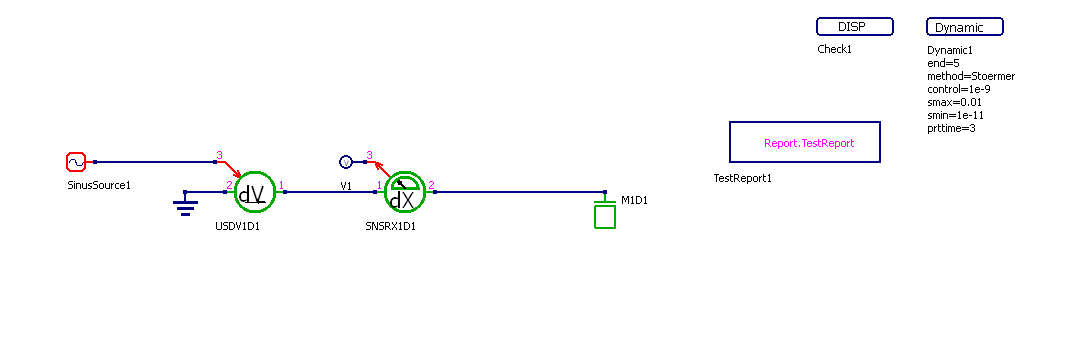
Рисунок 1 - Схема теста
Глава 3. Графики результатов теста
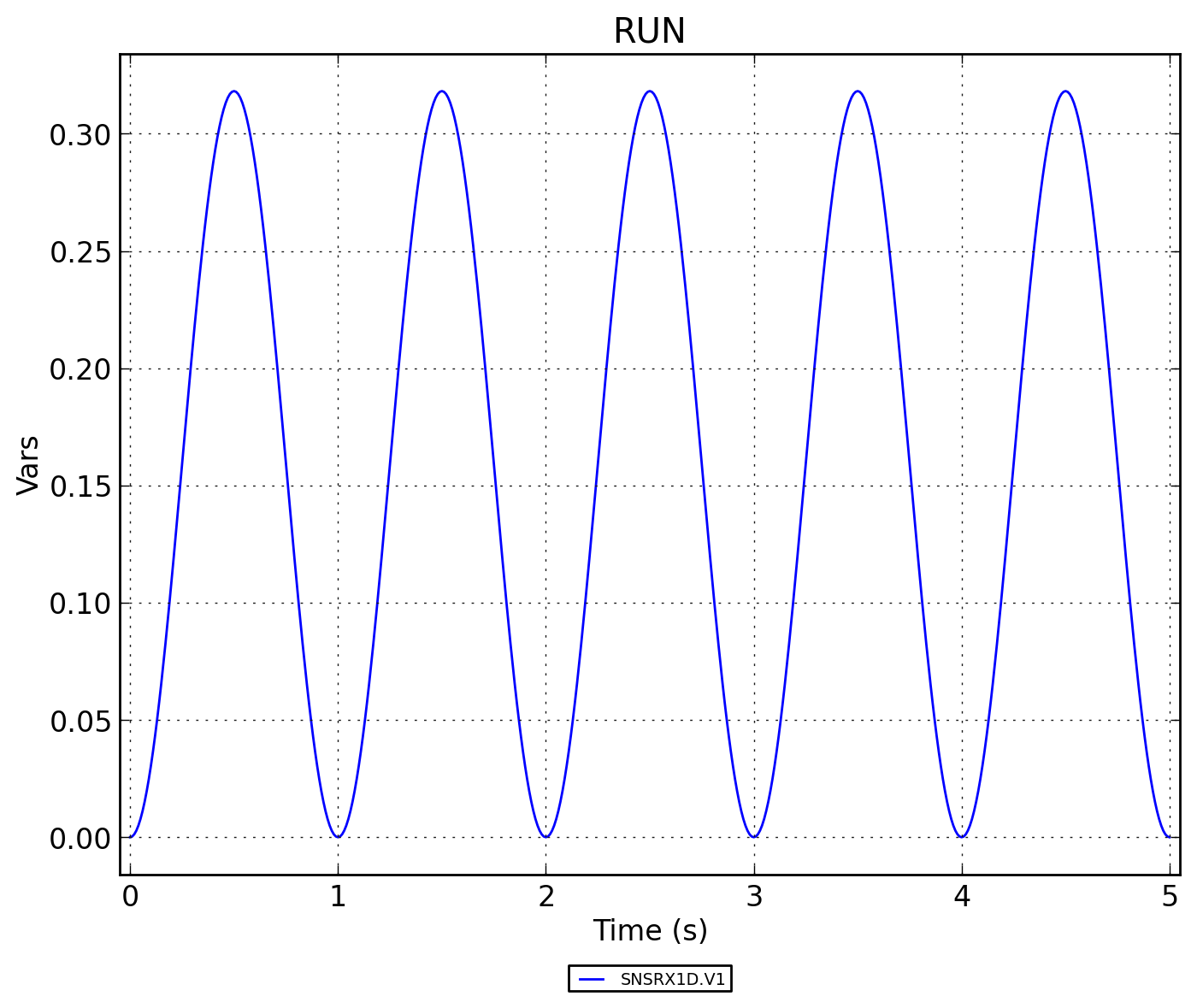
Рисунок 2 - SNSRX1D.RUN
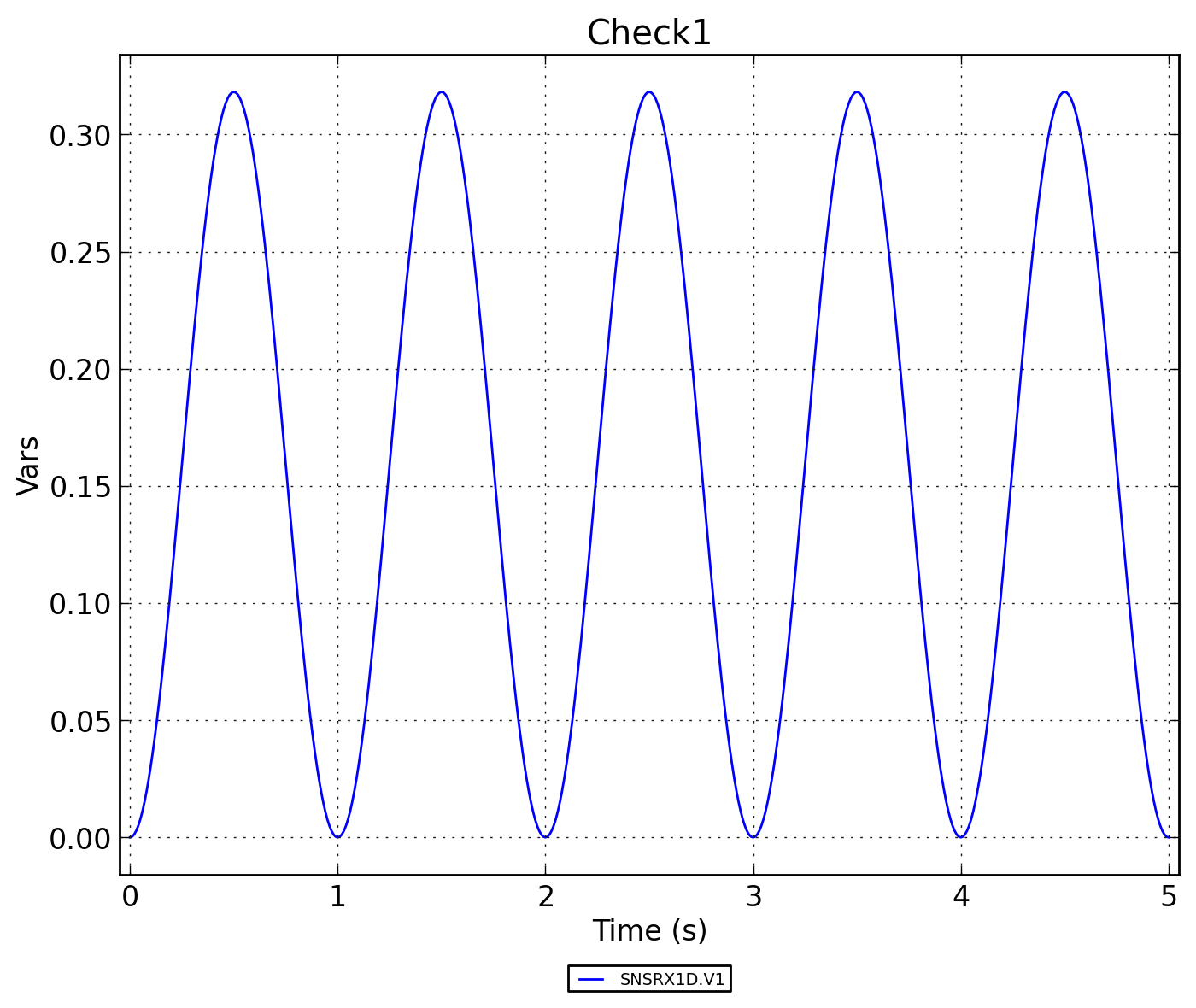
Рисунок 3 - SNSRX1D.Check1