Модель: SNSRF1D
Библиотека: Mechanics1D
Имя на уровне решателя: TSIG1
Аннотация: Датчик относительной силы
Обозначение: 
№ |
Обозначение порта |
Тип |
Наименование порта |
|---|---|---|---|
1 |
Port1 |
base.DOF1 |
1D механический порт, входной узел |
2 |
Port2 |
base.DOF1 |
1D механический порт, выходной узел |
3 |
Port3 |
base.DOF1 |
1D сигнальный порт, сигнал |
№ |
Параметр |
Тип |
Описание |
Значение по умолч. |
|---|---|---|---|---|
1 |
K |
base.real |
Коэффициент масштабирования выходного сигнала, _ |
1 |
2 |
R |
base.real |
Внутреннее сопротивление датчика, Ом |
1e-9 |
Результаты тестирования
www.laduga.com
Глава 1. Заданные параметры теста
Название тестируемого компонента
SNSRF1D
Модуль тестируемого компонента
Mechanics1D
Дата тестирования
Thu Mar 12 18:04:59 2026
Результат
OK
Глава 2. Схема тестируемого объекта
Модель элемента с управляемым однополюсным источником силы и датчиком относительной силы
Модель предназначена для анализа работы датчика относительной силы в системе
с механическим объектом (массой), на который воздействует управляемый однополюсный источник силы.
На объект воздействует управляемый источник силы, формирующий силовое воздействие в соответствии с внешним управляющим сигналом
(в данном случае по синусоидальному закону). Источник является однополюсным, то есть создаёт силу только в одном направлении.
Величина силы определяется коэффициентом пропорциональности управляющего сигнала и может иметь постоянную составляющую.
Основное внимание в данной модели уделяется датчику относительной силы,
который предназначен для измерения разности сил между двумя точками механической системы.
Такой датчик позволяет контролировать силовое взаимодействие между
элементами системы и анализировать, как изменяется сила при воздействии управляющего сигнала.
Датчик формирует выходной сигнал, пропорциональный измеряемой силе,
с учётом коэффициента масштабирования.
Наличие внутреннего сопротивления датчика позволяет учитывать влияние измерительного
элемента на систему и моделировать более реалистичное поведение измерительного устройства.
Таким образом, модель позволяет исследовать изменение относительной силы между элементами системы
при воздействии управляемого источника силы и оценить корректность работы датчика, измеряющего это силовое воздействие.
Параметры модели
F0 — постоянное значение силы, Н;
F0 = 0.0
Fk — коэффициент пропорциональности управляющего сигнала, Н;
Fk = 1.0
M — масса объекта, кг;
M = 0.5
K — коэффициент масштабирования выходного сигнала датчика;
K = 1
R — внутреннее сопротивление датчика, Ом;
R = 1·10⁻9
Элементы модели
Управляемый однополюсный источник силы — формирует силу в соответствии с управляющим сигналом
Масса — механический объект, на который воздействует создаваемая сила
Датчик относительной силы — измеряет разность сил между элементами системы и формирует выходной сигнал,
пропорциональный измеряемой силе с учётом коэффициента масштабирования
Датчик перемещения — измеряет перемещение объекта во времени
Датчик скорости — измеряет скорость объекта для анализа динамики движения
Датчик ускорения — измеряет ускорение объекта для контроля изменения движения под действием силы
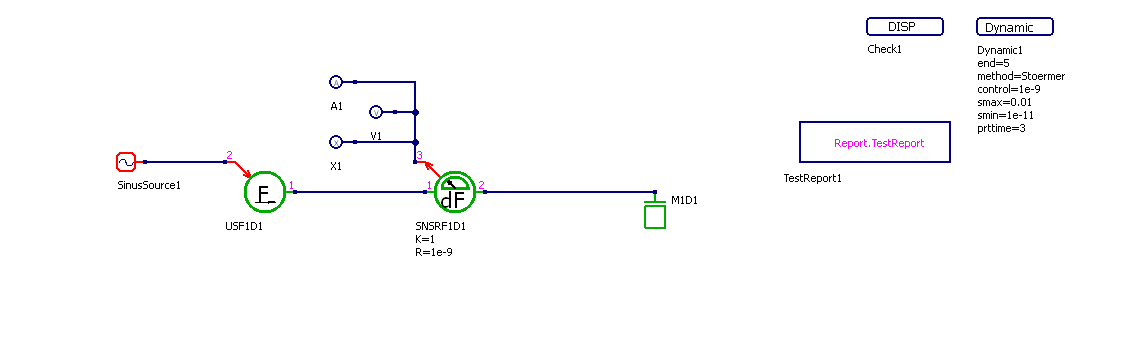
Рисунок 1 - Схема теста
Глава 3. Графики результатов теста
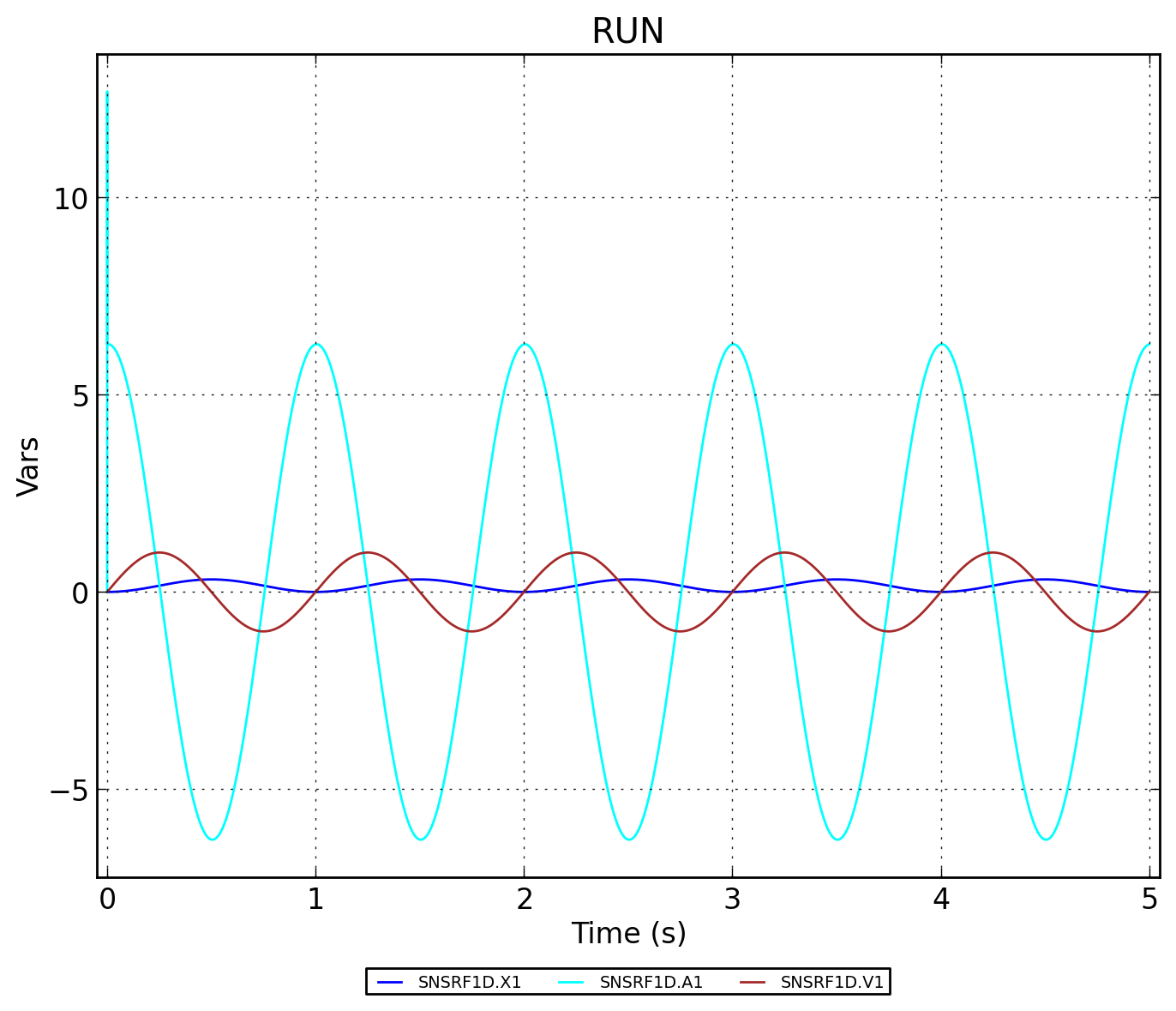
Рисунок 2 - SNSRF1D.RUN
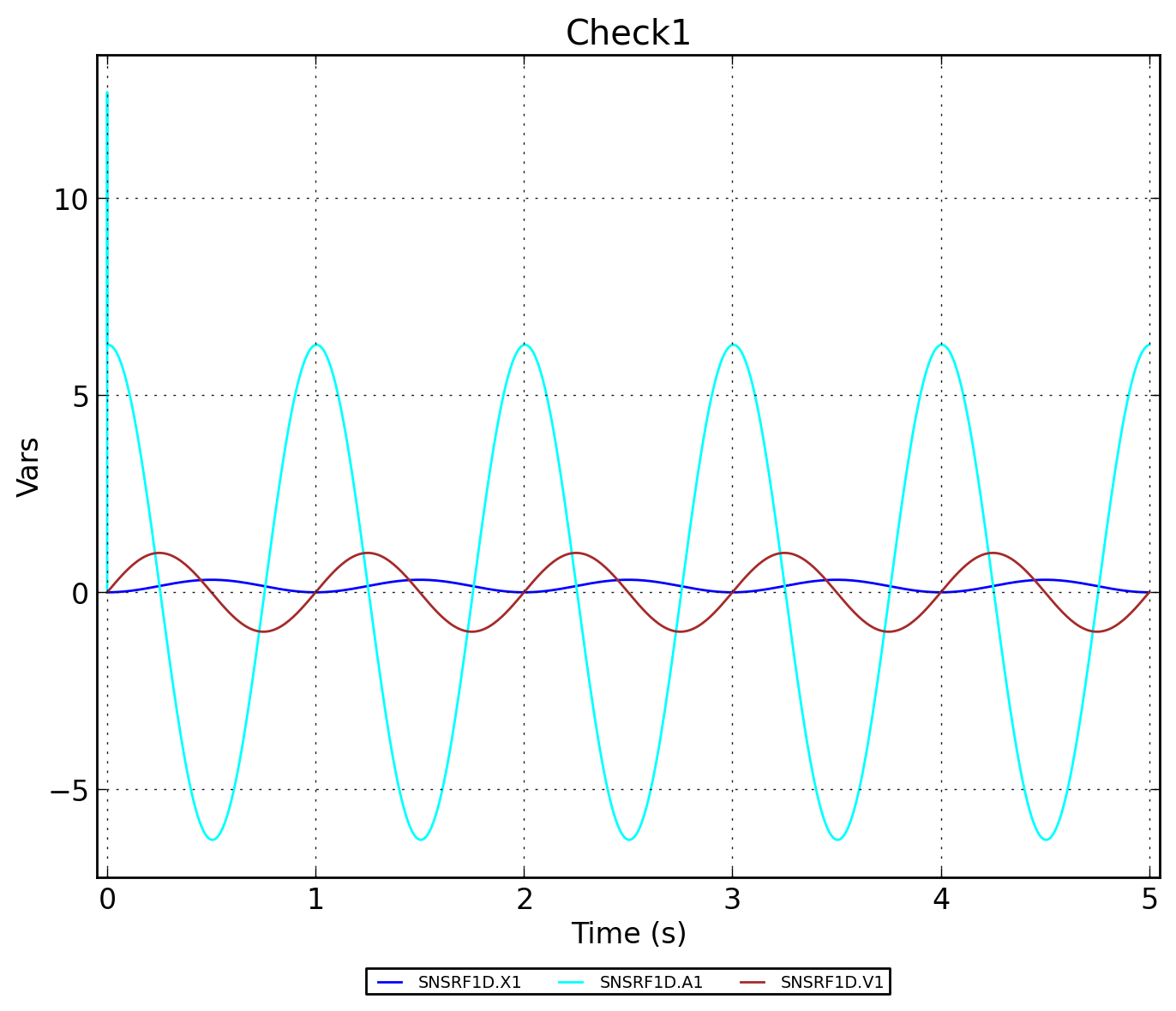
Рисунок 3 - SNSRF1D.Check1