Модель: SNSRV1D
Библиотека: Mechanics1D
Имя на уровне решателя: TSIG2
Аннотация: Датчик относительной скорости
Обозначение: 
№ |
Обозначение порта |
Тип |
Наименование порта |
|---|---|---|---|
1 |
Port1 |
base.DOF1 |
1D механический порт, 1-й узел (положительный) |
2 |
Port2 |
base.DOF1 |
1D механический порт, 2-й узел (отрицательный) |
3 |
Port3 |
base.DOF1 |
1D сигнальный порт, сигнал |
№ |
Параметр |
Тип |
Описание |
Значение по умолч. |
|---|---|---|---|---|
1 |
K |
base.real |
Коэффициент масштабирования выходного сигнала, _ |
1 |
Результаты тестирования
www.laduga.com
Глава 1. Заданные параметры теста
Название тестируемого компонента
SNSRV1D
Модуль тестируемого компонента
Mechanics1D
Дата тестирования
Thu Mar 12 18:04:33 2026
Результат
OK
Глава 2. Схема тестируемого объекта
Модель элемента с управляемым однополюсным источником скорости (идеальным/неидеальным) и датчиком относительного перемещения
Модель предназначена для анализа работы датчика относительного перемещения в системе с
механическим объектом (массой), движение которого задаётся управляемым однополюсным источником скорости.
На объект воздействует управляемый источник скорости, формирующий движение в соответствии
с внешним управляющим сигналом (в данном случае по синусоидальному закону).
Источник является однополюсным, то есть формирует скорость только в одном направлении.
Параметр внутренней вязкости позволяет учитывать идеальный или неидеальный характер источника скорости.
Основной задачей данной модели является исследование работы датчика относительного перемещения.
Датчик измеряет разность перемещений между двумя точками системы — подвижным объектом (массой) и выбранной опорной точкой.
В отличие от обычного датчика перемещения, который фиксирует абсолютное положение объекта, датчик относительного
перемещения показывает насколько изменилось положение одного элемента системы относительно другого.
Это позволяет анализировать взаимное движение элементов механической системы, контролировать
корректность передачи движения и оценивать поведение системы при воздействии управляющего сигнала.
Таким образом, модель позволяет исследовать, как изменяется относительное перемещение
между элементами системы при управлении источником скорости, а также проверить
корректность работы датчика, измеряющего эту разность перемещений.
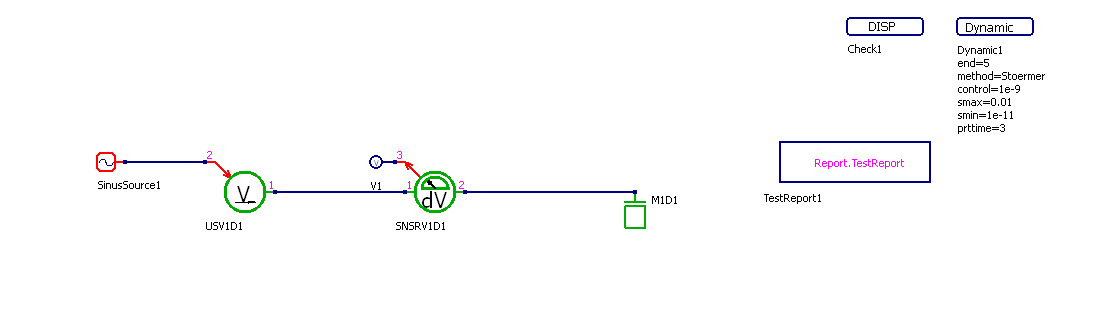
Рисунок 1 - Схема теста
Глава 3. Графики результатов теста
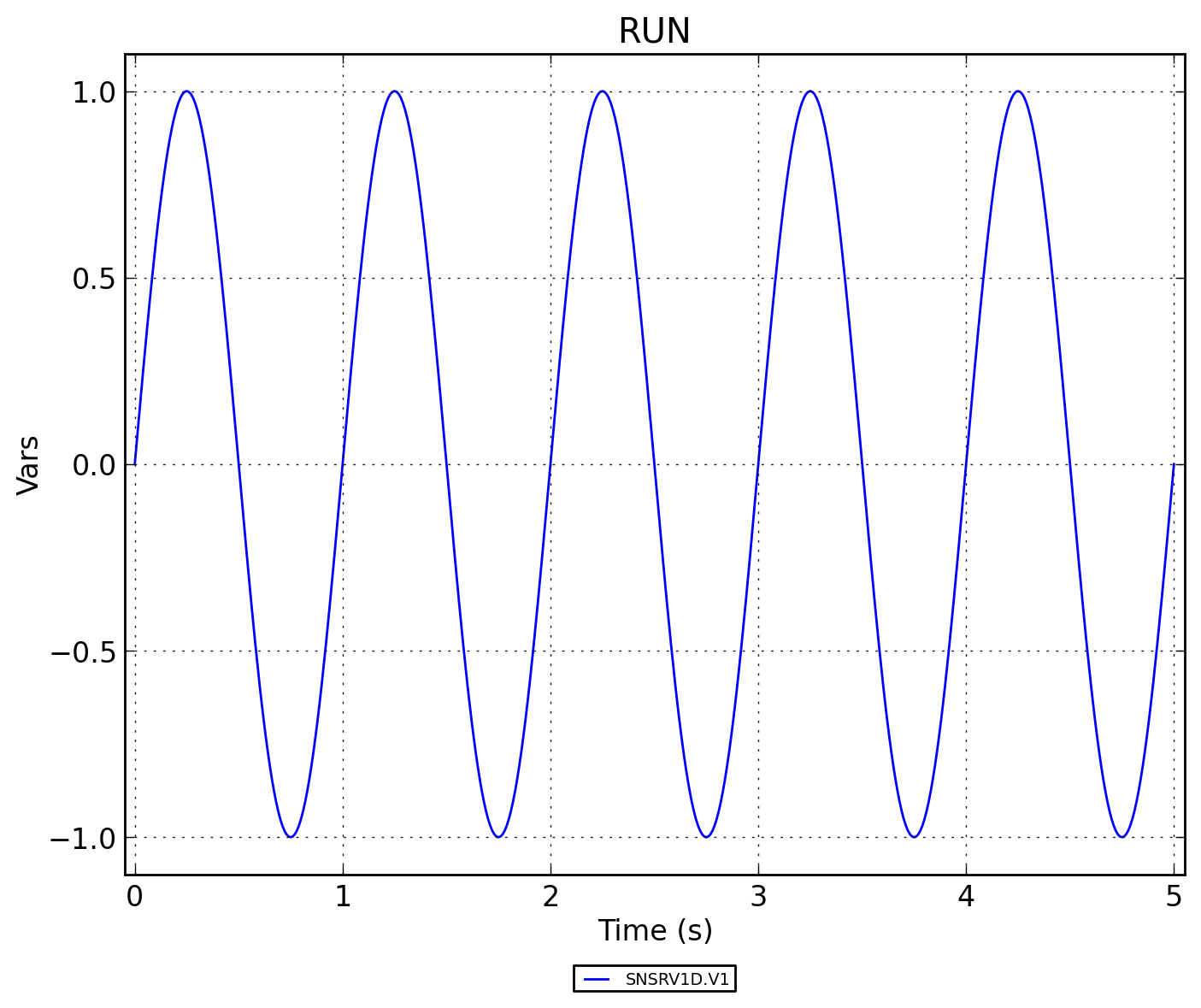
Рисунок 2 - SNSRV1D.RUN
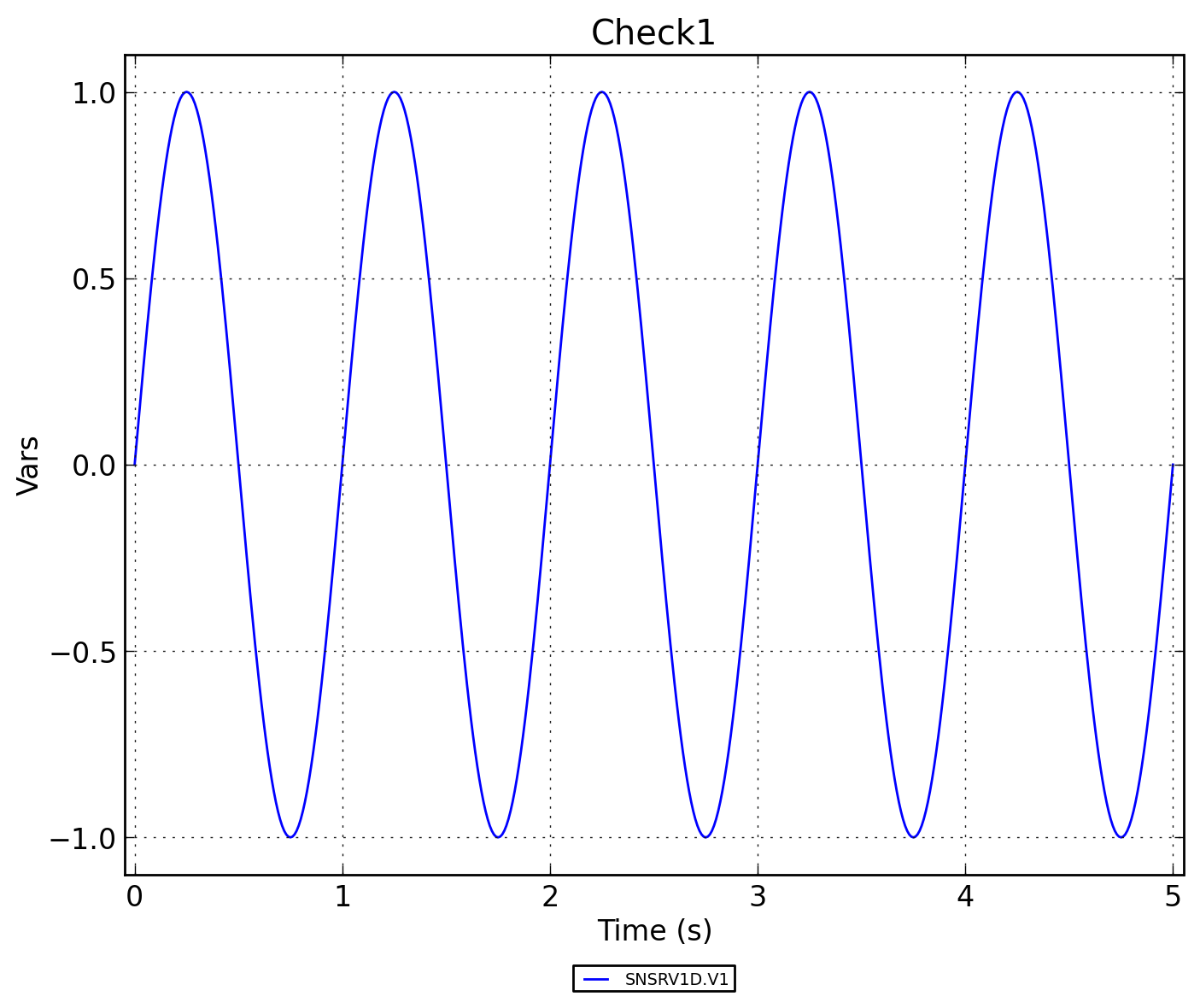
Рисунок 3 - SNSRV1D.Check1