Модель: STRC
Библиотека: Mechanics1D
Имя на уровне решателя: STRC0
Аннотация: Источник перемещения с трапецеидальной формой сигнала, циклический
Обозначение: 
№ |
Обозначение порта |
Тип |
Наименование порта |
|---|---|---|---|
1 |
Port1 |
base.DOF1 |
1D механический порт, узел1 |
2 |
Port2 |
base.DOF1 |
1D механический порт, узел2 |
№ |
Параметр |
Тип |
Описание |
Значение по умолч. |
|---|---|---|---|---|
1 |
BT |
base.real |
Продолжительность заднего фронта импульса, с |
1.0 |
2 |
CT |
base.real |
Продолжительность цикла, с |
3.0 |
3 |
D |
base.real |
Начальная задержка, c |
0.0 |
4 |
FT |
base.real |
Продолжительность переднего фронта импульса, с |
1.0 |
5 |
HT |
base.real |
Продолжительность вершины импульса, с |
1.0 |
6 |
K |
base.real |
Коэффициент пропорциональности между отклонением разности перемещений от заданной и усилием, генерируемым элементом, Н/м; Н·м/радиан |
1e6 |
7 |
VH |
base.real |
Активный уровень, м; радианы |
1.0 |
8 |
VL |
base.real |
Пассивный уровень, м; радианы |
0.0 |
Результаты тестирования
www.laduga.com
Глава 1. Заданные параметры теста
Название тестируемого компонента
STRC
Модуль тестируемого компонента
Mechanics1D
Дата тестирования
Thu Mar 12 18:00:22 2026
Результат
OK
Глава 2. Схема тестируемого объекта
Модель элемента с источником перемещения трапецеидальной формы (циклический сигнал)
Модель элемента с источником перемещения трапецеидальной формы предназначена для анализа поведения
механического объекта (массы) при циклическом кинематическом воздействии.
На объект воздействует источник перемещения, формирующий сигнал трапецеидальной формы, периодически
повторяющийся во времени, в результате чего возникает движение объекта.
Модель описывает динамику системы, при которой перемещение и скорость объекта определяются активным и
пассивным уровнями сигнала, длительностями переднего и заднего фронтов, временем удержания вершины,
а также периодом повторения цикла. Усилие, воздействующее на объект, формируется пропорционально
отклонению разности перемещений от заданного значения.
Состояние объекта контролируется с помощью датчиков перемещения и скорости, что позволяет оценить корректность
выполнения трапецеидального закона движения и реакцию объекта на циклическое входное воздействие.
Таким образом, модель позволяет определить, как трапецеидально изменяющееся перемещение влияет на движение объекта,
а также проследить изменение его положения и скорости во времени в течение повторяющихся циклов.
Параметры модели
BT — продолжительность заднего фронта импульса, с
CT — продолжительность цикла, с
D — начальная задержка сигнала, с
FT — продолжительность переднего фронта импульса, с
HT — продолжительность вершины импульса, с
VH — активный уровень перемещения, м (или рад)
VL — пассивный уровень перемещения, м (или рад)
K — коэффициент пропорциональности между отклонением разности перемещений от заданной и усилием,
генерируемым элементом, Н/м (или Н/рад)
M — масса объекта, кг
Элементы модели
Источник перемещения трапецеидальной формы — формирует циклический сигнал перемещения с заданными параметрами фронтов,
уровней и периода
Элемент разности перемещений — преобразует отклонение разности перемещений в усилие в соответствии с коэффициентом K
Масса — механический объект, на который действует формируемое усилие
Датчик перемещения — измеряет перемещение объекта во времени
Датчик скорости — измеряет скорость движения объекта для контроля динамики
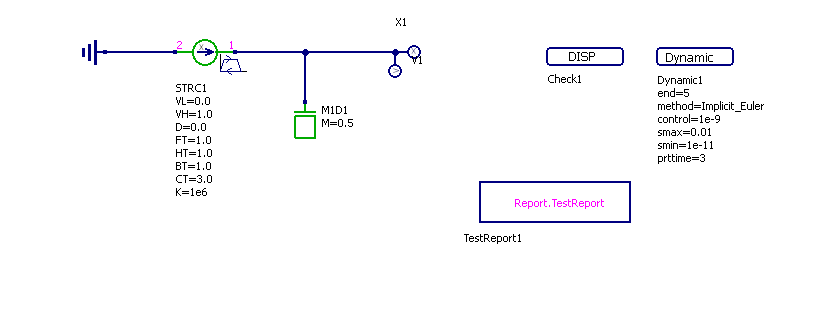
Рисунок 1 - Схема теста
Глава 3. Графики результатов теста
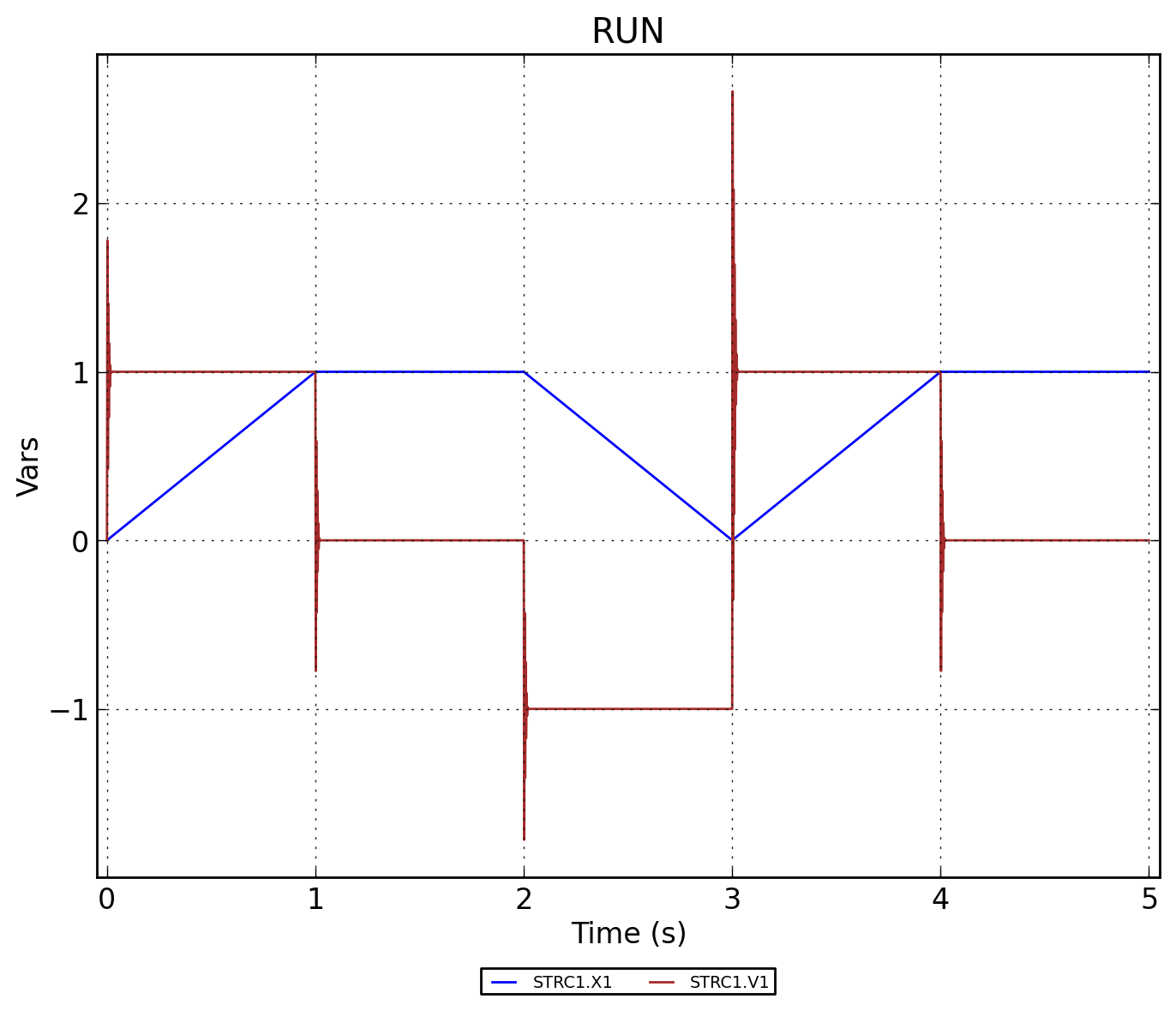
Рисунок 2 - STRC.RUN
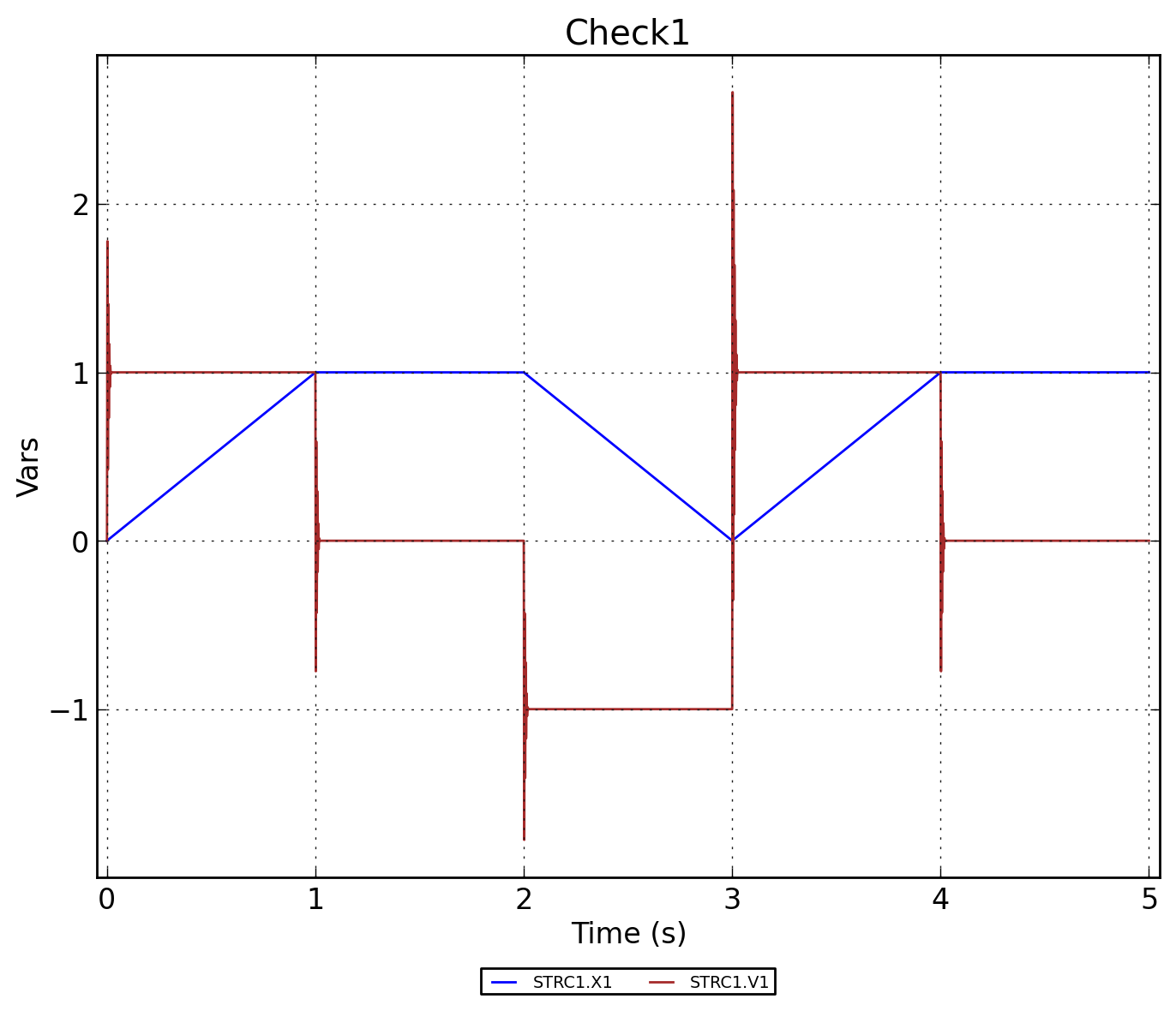
Рисунок 3 - STRC.Check1