Первый проект Pradis!
Данное руководство на практическом примере позволит освоить интерфейс Pradis, параллельно формируя понимание принципов создания расчётных моделей динамических систем.
В качестве примера разберем процесс создания и анализа простой, но фундаментальной физической модели — пружинного маятника.
Процесс моделирования и анализа разбит на следующие этапы:
Построение простейшей динамической модели в Pradis.
Определение начальных условий для проведения расчета.
Определение расчетных характеристик для проведения анализа.
Формирование заданий на расчет.
Обработка и вывод результатов.
Постановка задачи
Построить динамическую модель пружинного маятника и провести анализ зависимости скорости, перемещения подвешенного груза и силы упругости пружинного маятника от времени при его свободных колебаниях, вызванных начальным отклонением от положения равновесия. В данной модели сила тяжести не учитывается.
Исходные данные:
Жесткость пружины 100 Н/м
Вязкость (сила вязкого трение) 0,1 Н*с/м
Масса 1 кг
Начальное смещение X0 = 1 м
Создание модели
Запуск препроцессора
Для построения расчетной схемы/модели пружинного маятника запустить препроцессор. Запуск осуществляется двойным щелчком мыши по ярлыку PRADIS Qucs на рабочем столе (рисунок 2):

Откроется окно препроцессора (рисунок 3):
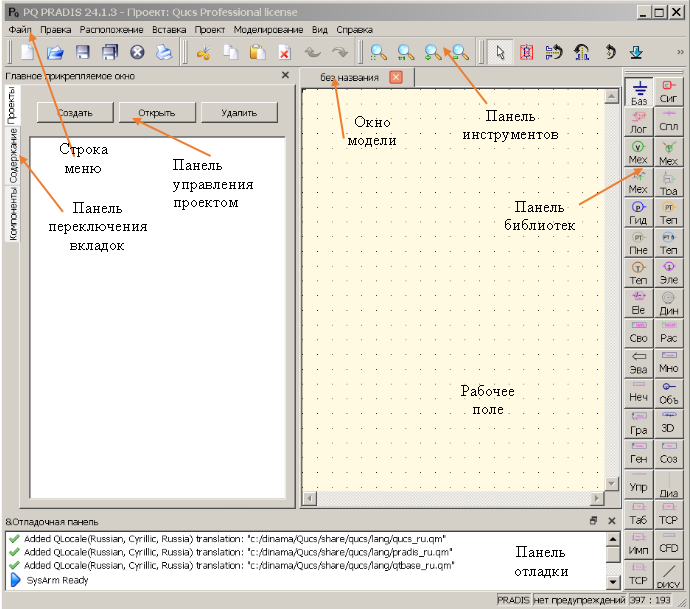
Рисунок 3. Окно препроцессора
Подробное описание окна препроцессора приведено здесь.
Создание проекта
На панели управления проектом (см. рисунок 3) нажать на кнопку «Создать». Откроется окно диалога для определения имени проекта (рисунок 4)
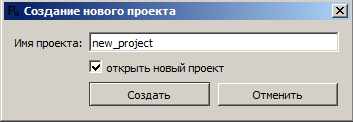
Рисунок 4. Диалог определения имени проекта
Пользователю необходимо задать имя проекта, после чего произойдет активация кнопки «Создать». Оставить, либо убрать галочку «Открыть новый проект». При установленной галочке проект открывается автоматически. Нажать на кнопку «Создать». В Главном прикрепляемом окне появится проект new_project. Нажав на имя проекта два раза, откроется структура проекта (подробное описание структуры проекта приведено здесь). Сам проект, по умолчанию, создается для ОС Windows в каталоге:
С:\Users\<имя пользователя>\.qucs
По своей сути, проект представляет собой папку, содержащую все данные и файлы, относящиеся к создаваемой модели.
Для построения модели нужно создать файл с расширением «.sch», который будет содержать код, описывающий схему модели. Перейти на вкладку «Файл→Сохранить как…». Откроется стандартное диалоговое окно ОС Windows для сохранения файла. Проверить путь на каталог:
С:\Users\<имя пользователя>\.qucs\new_project.
В поле «Имя файла:» задать имя файла pendulum, расширение «.sch» добавится автоматически.
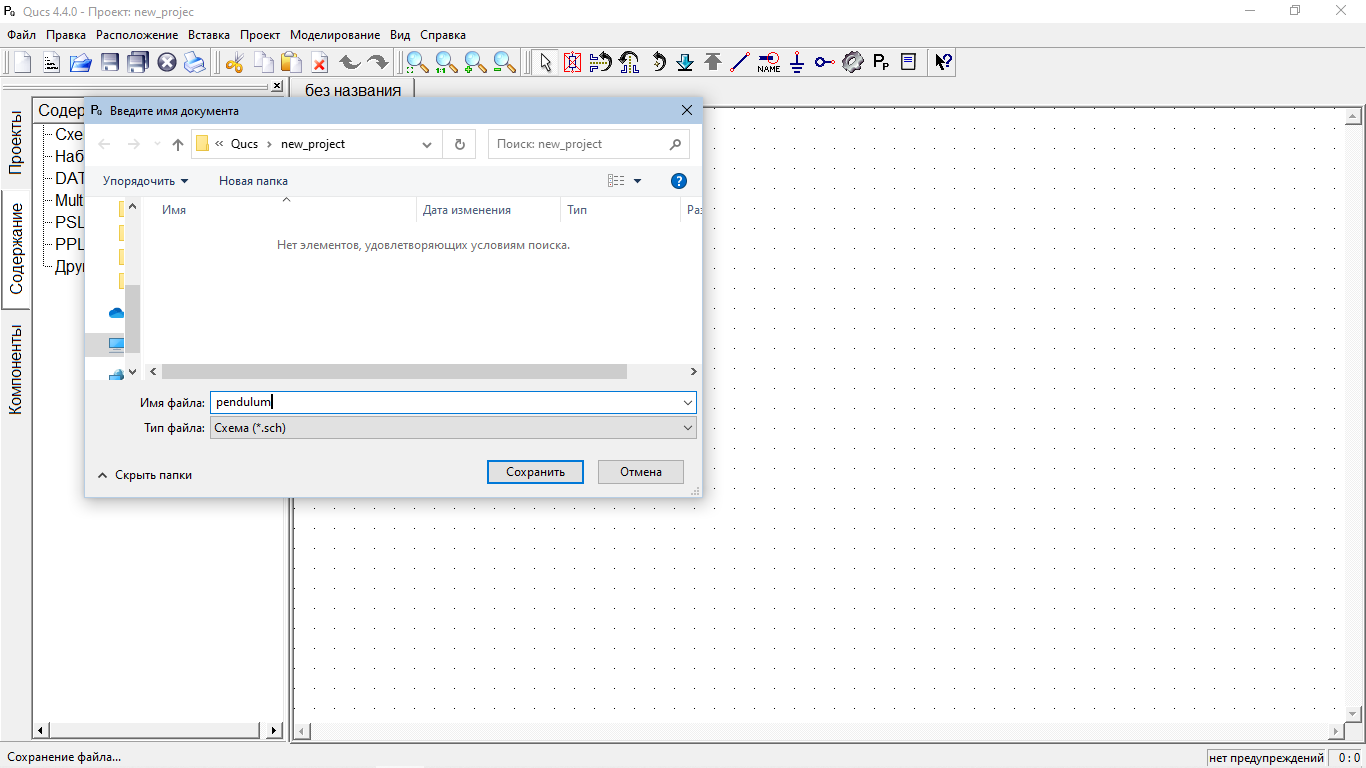
Нажать кнопку «Сохранить».
В результате название файла «pendulum.sch» появится в левом верхнем углу рабочего поля.
Проект для построения модели готов.
Построение модели
Для построения модели необходимо:
определить элементы, из которых она состоит;
определить, в какой библиотеке находятся эти элементы;
разместить элементы модели на схеме с учетом степеней свободы.
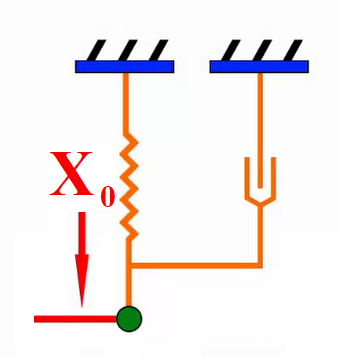
В соответствии с рисунком 1 модель пружинного маятника состоит из пружины, груза (массы), демпфера (элемента вязкости) и крепления. Его движение возникает после начального возмущения – отклонения груза на величину X₀ от положения равновесия.
При определении библиотеки, содержащей элементы пружинного маятника, необходимо руководствоваться физической природой модели, либо составных частей модели. В данном случае, пружинный маятник относится к разделу одномерной механики, поскольку её динамика полностью определяется одной степенью свободы. Это означает, что для описания состояния системы (положения и скорости груза) в любой момент времени достаточно одной обобщённой координаты, например, деформации пружины x. Уравнение движения, выведенное из второго закона Ньютона (m * d²x/dt² = -k * x), является обыкновенным дифференциальным уравнением второго порядка относительно одной переменной x(t), что является классическим признаком одномерной механической системы.
Таким образом, элементы/компоненты модели находятся в библиотеке «Механика 1D» (подробное описание библиотеки «Механика 1D» и ее компонентов находится здесь).
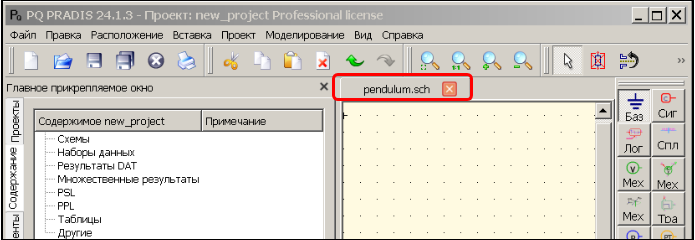
Активируйте меню компонентных библиотек, нажав на вкладку «Компоненты» в окне «Главное прикрепляемое окно», которое может располагаться слева или справа от рабочей области, в зависимости от предпочтений пользователя.
Далее в этом меню из выпадающего списка выберите библиотеку
«Механика 1D». Выберите компонент упругой связи «K»  и
поместите его мышью на поле модели (рисунок 5).
и
поместите его мышью на поле модели (рисунок 5).
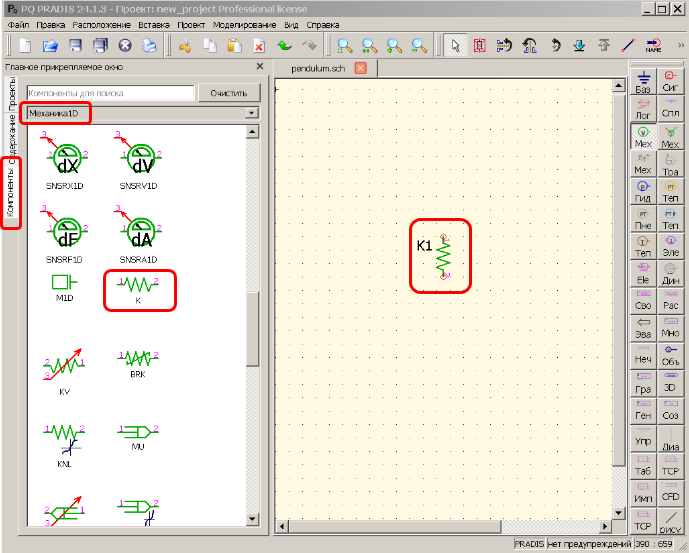
Рисунок 5. Добавление компонента упругой связи
В библиотеке «Базовые компоненты» выберите компонент «Земля» |
, поместите его на рабочем поле модели над компонентом упругой связи, предварительно повернув необходимым образом с помощью правой кнопки мыши, затем соедините компоненты, используя проводник
(находится в Меню->Вставка->Проводник или на «Панели инструментов» в группе «Работать») или нажав Ctrl + E. Далее выберите компонент вязкости
, поместите на рабочем поле параллельно компоненту упругой связи и соедините (рисунок 6).
Для соединения компонентов, необходимо воспользоваться фиксацией линии проводника щелчком левой кнопки мышки.
Затем, выберите компонент  одномерного инерционного элемента и поместите его на рабочем поле (рисунок 7).
одномерного инерционного элемента и поместите его на рабочем поле (рисунок 7).
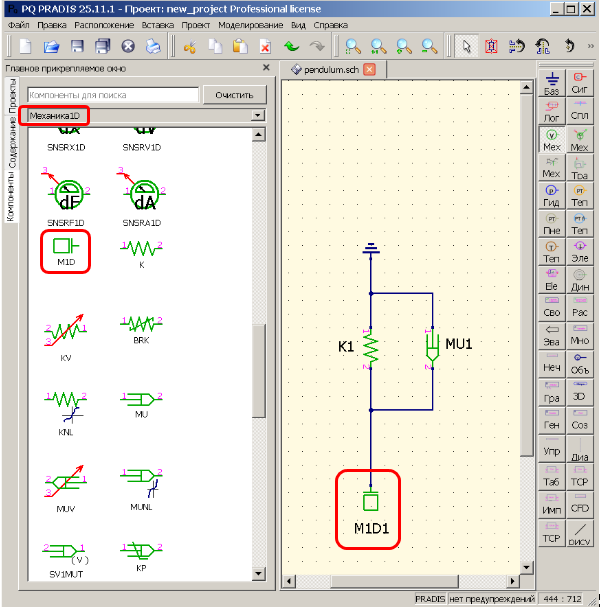
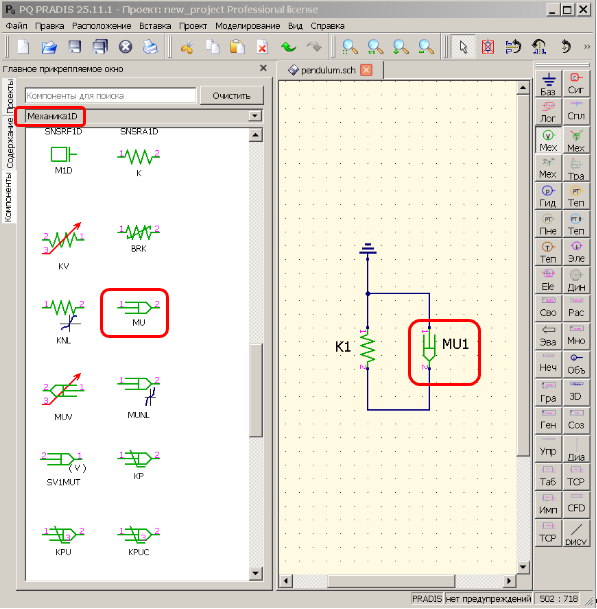
Модель пружинного маятника, который находится в покое – построена. Для
того, чтобы добавить начальное возмущение/отклонение в этой же
библиотеке «Механика1D» выберите компонент начального перемещения для
одной степени свободы  и поместите его на рабочем поле модели
(рисунок 8).
и поместите его на рабочем поле модели
(рисунок 8).
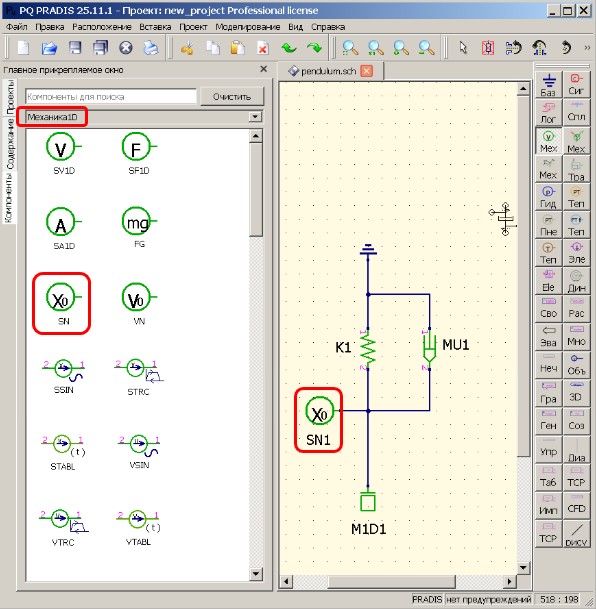
Модель пружинного маятника с заданным начальным отклонением построена.
Определение входных данных
Входными данными модели являются:
Жесткость пружины 100 Н/м
Вязкость 0,1 Н*с/м
Масса 1 кг
Начальное смещение X0 = 1 м
Таким образом, необходимо задать входную информацию для компонентов модели: элемента упругой связи, элемента вязкости, элемента массы и начального смещения для одной степени свободы.
Входные данные для компонентов задаются посредством диалогового окна «Изменить свойства» (подробное описание окна здесь).
Для определения входных данных компонента MU1 «Элемент вязкости», необходимо двойным щелчком левой клавиши мыши по компоненту MU1 открыть окно «Изменить свойства» и во вкладке «Свойства» установить заданные значения входных данных:
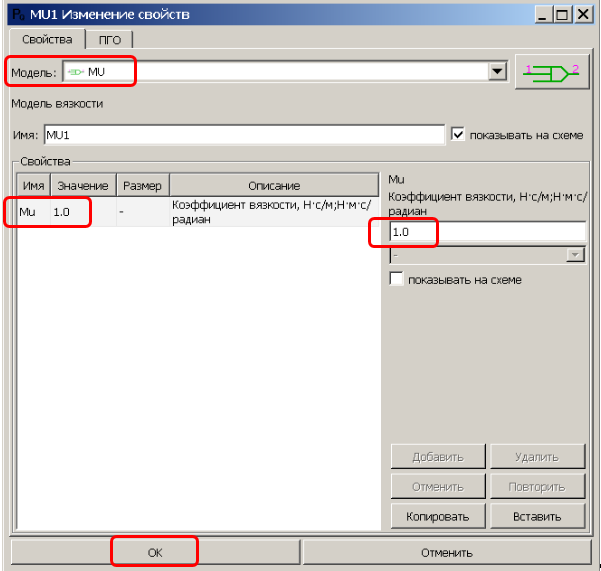
В поле «Коэффициент вязкости» изменить установленное значение по умолчанию на заданное: 0.1. Нажать кнопку «Применить» - значение, установленное в таблице слева в графе «Значение», изменится на заданное: 0.1.
Аналогичные действия выполнить для компонента упругой связи
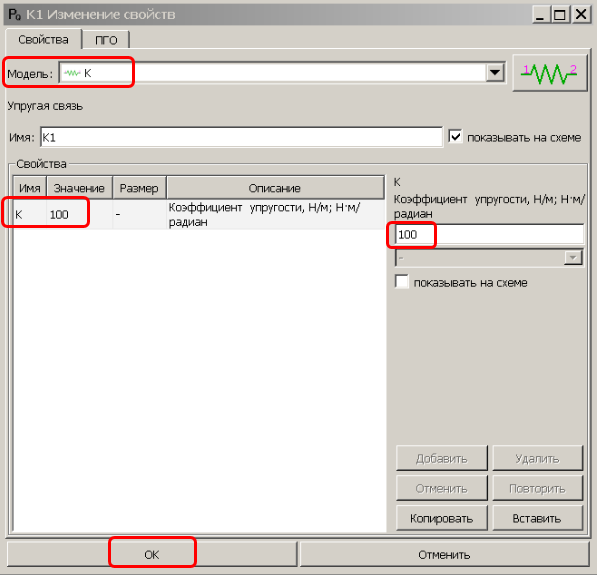 ,
,
для элемента массы
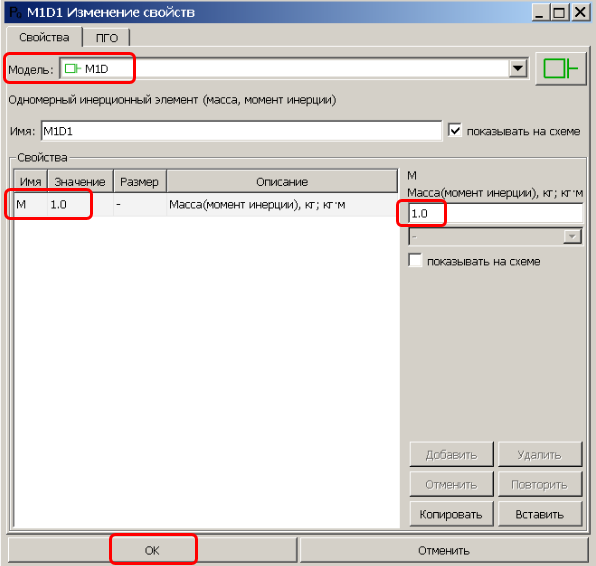 ,
,
для начального смещения
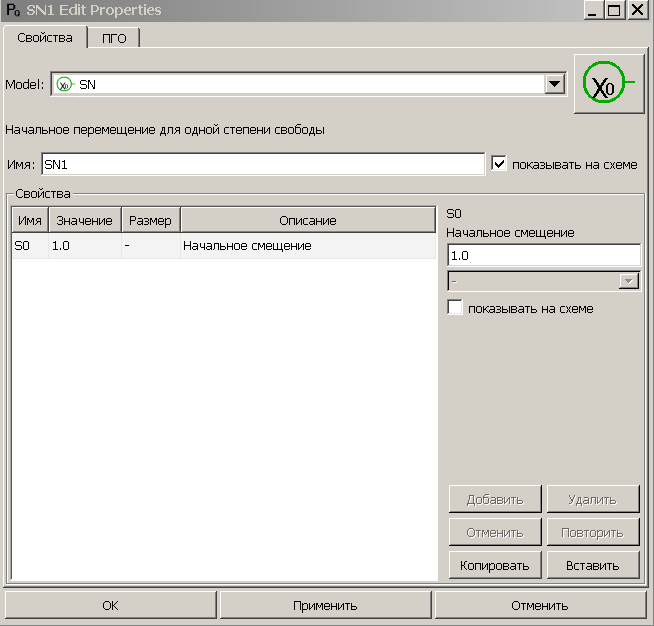
Входные данные для компонентов модели/расчетной схемы определены.
Описание выходных расчетных характеристик
Добавить индикаторы
Для отображения изменения скорости, перемещения и силы упругости пружины необходимо к построенной модели добавить индикаторы, которые будут фиксировать значения выбранных параметров на определенные моменты времени в процессе расчета. Соответственно, на схему модели нужно добавить индикатор скорости, индикатор перемещения и индикатор силы.
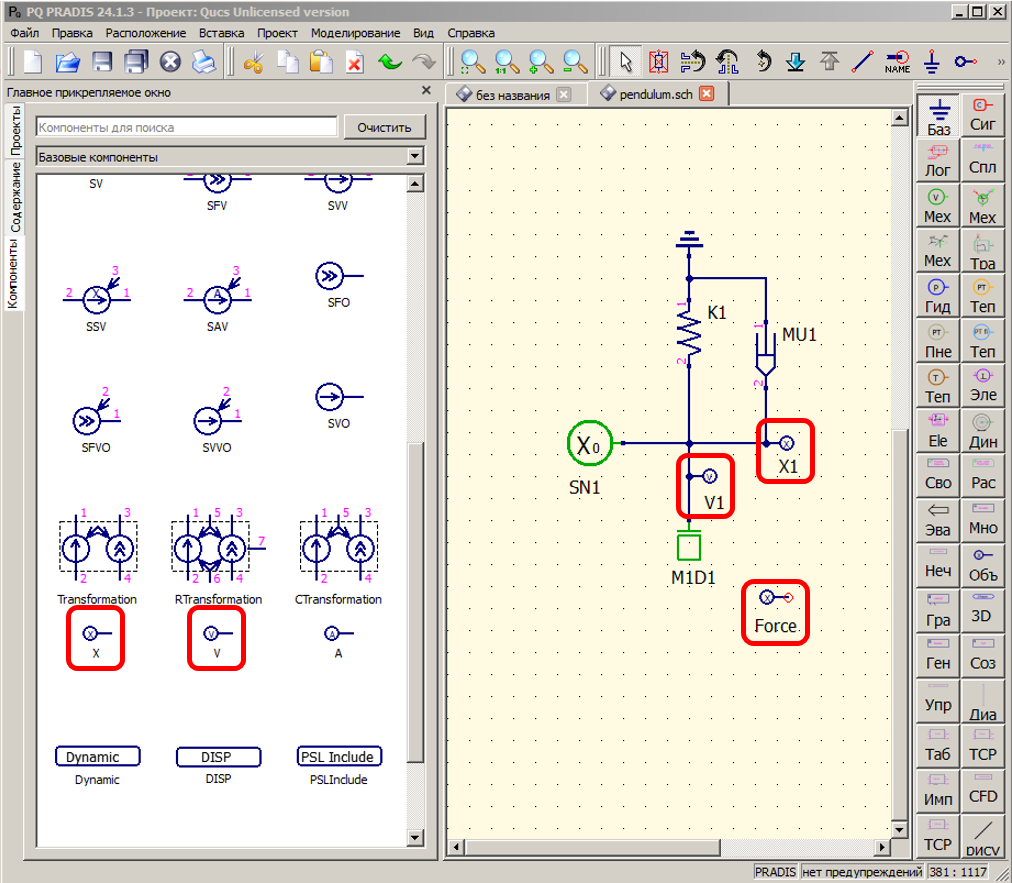
Для этого в меню компонентных библиотек из выпадающего списка выберите
библиотеку «Базовые компоненты». Выберите индикаторы скорости (V)
 и перемещения (X)
и перемещения (X)  , поместите на рабочем поле модели
как показано на рисунке 11.
, поместите на рабочем поле модели
как показано на рисунке 11.
Чтобы определить силу в пружине, добавьте индикатор X, не соединяя ни с чем.
Примечание - индикатор Х используется не только как индикатор масштабированного значения перемещения в узле, но и как универсальный индикатор значений внутренних переменных.
Для удобства, индикатор Х, используемый для измерения силы упругости пружины, обозначен как «Force» (как изменить название элемента схемы см. здесь) (рисунок 9).
Необходимые индикаторы установлены.
Установить выходные параметры
В соответствии с Постановкой задачи выходными параметрами являются: скорость, перемещение и сила упругости пружины. Для получения значений этих параметров в процессе расчета, в диалоговом окне «Изменение свойств» во вкладке «Выходные значения» необходимо указать следующие параметры: N – обозначение компонента, I – функция для измерения потоковой переменной (перечень возможных функций здесь), C – степень свободы, в формате: N.I(C).
Индикаторы перемещения (X) и скорости (V) работают без дополнительной настройки, так как записывают данные с тем же шагом и диапазоном, что и результаты расчета модели.
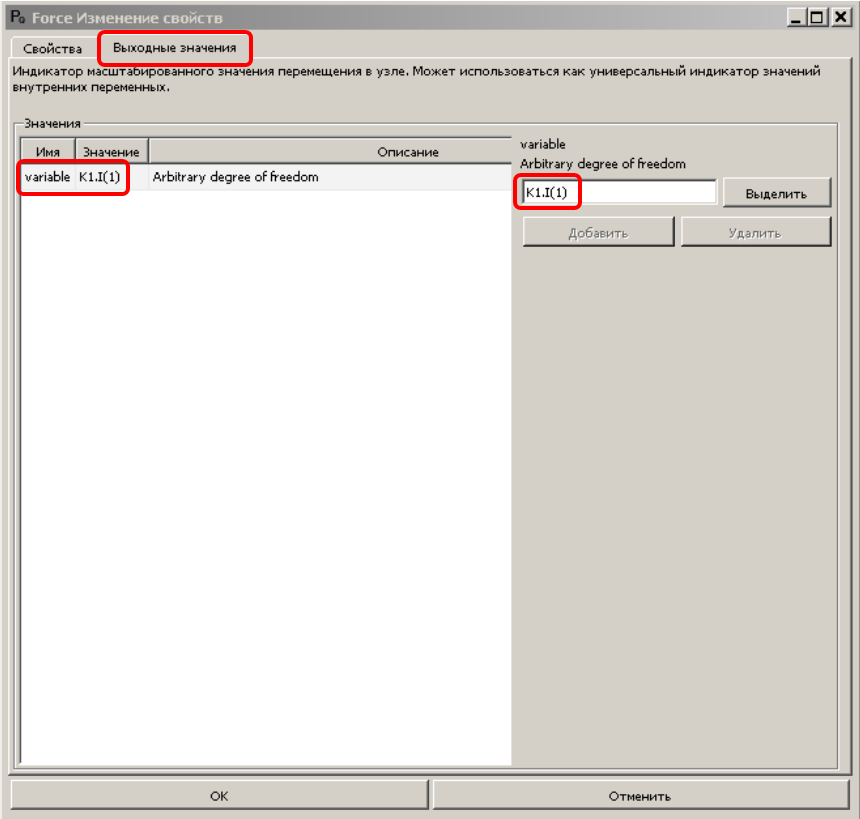
Для того чтобы измерить силу упругости пружины K1 необходимо выполнить следующие действия. Войдите в свойства компонента «Force» двойным нажатием левой кнопки мыши на компонент, либо нажав правой кнопкой мыши на компонент и в появившемся меню выбрав «Изменить свойства». Во вкладке «Выходные параметры» нужно ввести K1.I(1) (рисунок 10), где K1 – обозначение компонента (элемента) упругой связи, I – функция для измерения потоковой переменной (здесь силы), (1) – номер степени свободы модели, через которую мы измеряем силу.
Формирование задания на расчет
Компоненты для формирования задания на расчет
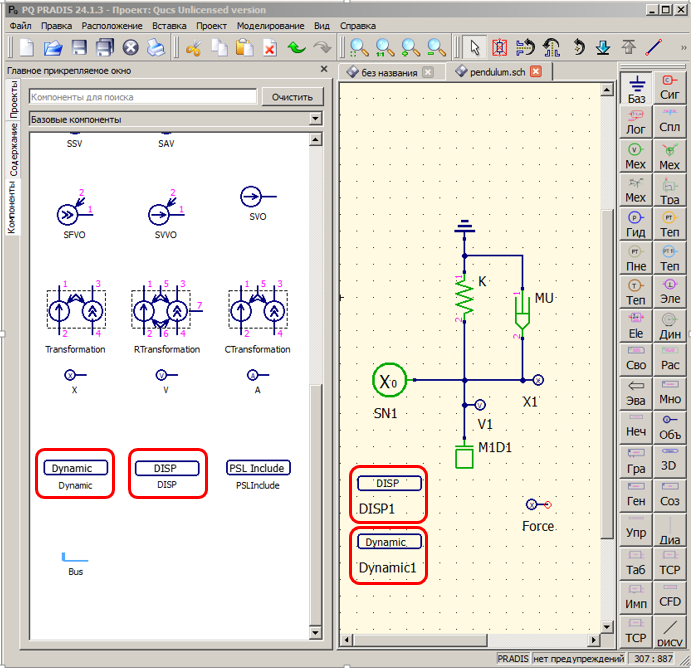
Для выполнения расчета и последующего анализа результатов следует использовать следующие компоненты из библиотеки «Базовые компоненты»:
Dynamic – задает параметры метода интегрирования и управляет настройками динамического анализа.
DISP – выводит заданные пользователем данные в виде графиков и таблиц для параметров, отмеченных индикаторами.
На схеме обязательно должен быть хотя бы один компонент Dynamic, и хотя бы один компонент DISP. В случае отсутствия – в консоли будет выдано сообщение об ошибке.
На рисунке 11 показано размещение компонентов Dynamic и DISP.
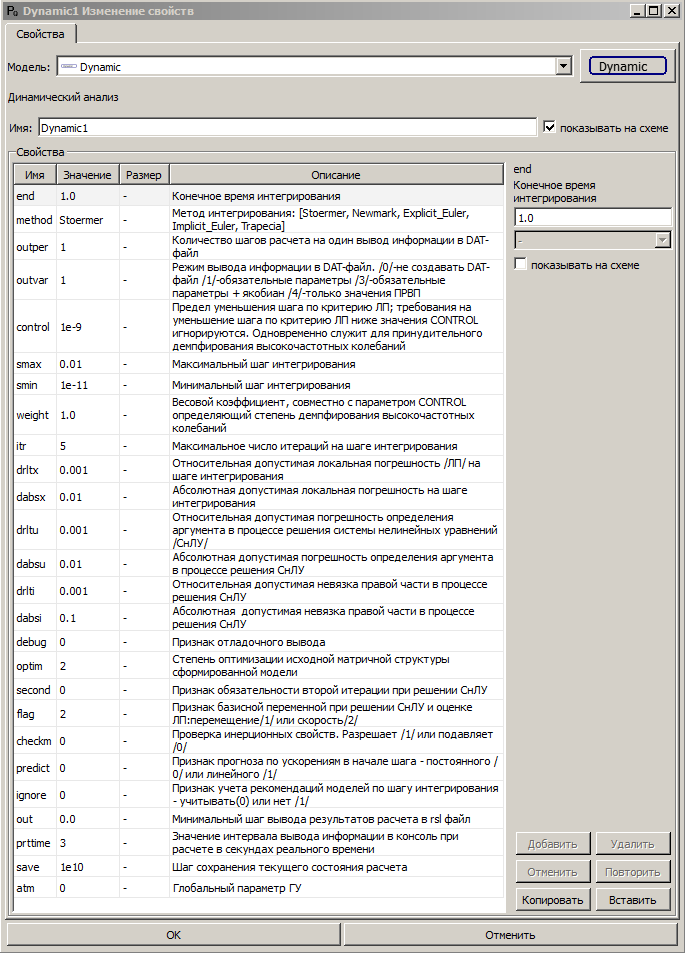
Настройка компонента Dynamic
Определение параметров компонента Dynamic осуществляется с помощью интерфейса окна «Изменения свойств». На рисунке ??? приведен вид окна со значениями, установленными по умолчанию.
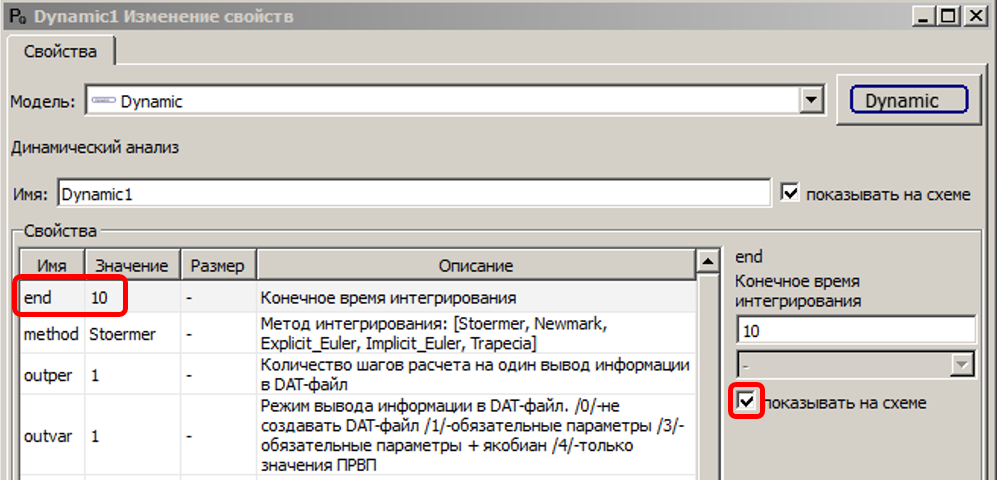
Для получения более информативного отображения результатов зададим значения следующих параметров:
end = 10 – определяет максимальное значение времени на оси X графика,
prttime = 30 – задаёт интервал вывода данных в консоли.
Рекомендуется отображать изменённые значения на схеме. Чтобы отобразить новые значения непосредственно на схеме, при изменении параметра активируйте опцию «показывать на схеме», установив соответствующий флажок:
В результате получим:
Задание параметров интегрирования завершено.
Отображение результатов в виде графиков
Для отображения результатов в виде графиков необходимо провести настройки DISP. Для этого двойным щелчком мыши по компоненту DISP открывается окно «Изменить свойства», в котором пользователь задает данные для отображения.
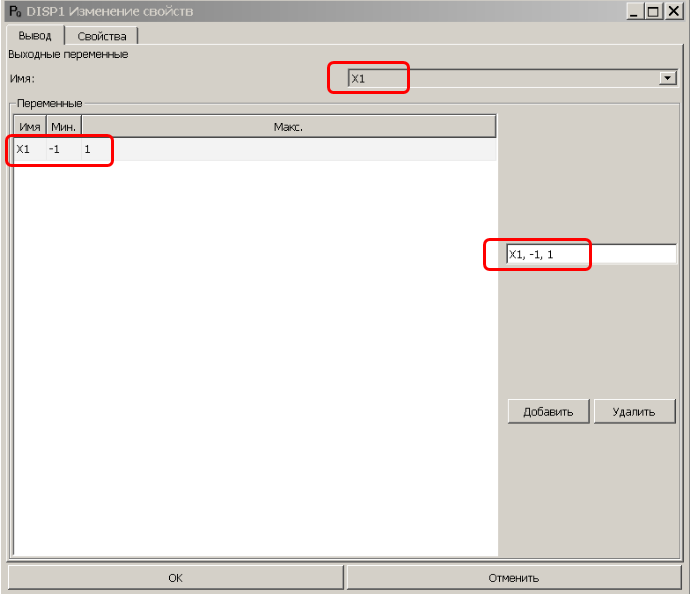
Рисунок 12. Настройка компонента DISP для вывода зависимости перемещения от времени
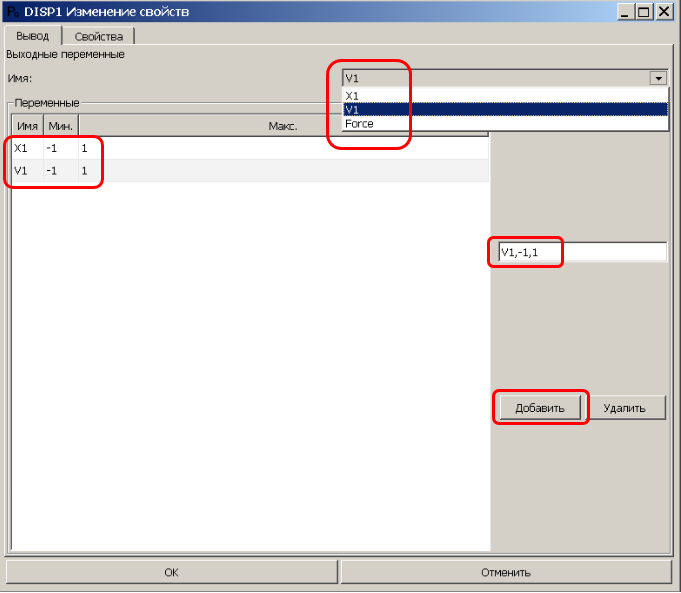
Рисунок 13. Настройка компонента DISP для отображения нескольких графиков в одном окне
Формирование задания на расчет построенной модели завершено.
Запуск на расчет
Для запуска расчета нажмите кнопку «Моделировать» в меню «Моделирование» или используйте клавишу F2 (рисунок 14):
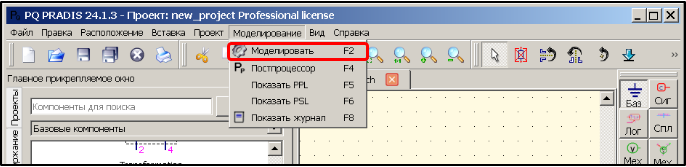
Рисунок 14. Расположение пункта меню «Моделировать»
Подсистема оперативного отображения, запускаемая в консоли, отображает ход и результаты моделирования на основе заданных настроек компонента Dynamic. В ее функции входит вывод текущих данных, статусных сообщений и уведомлений об ошибках.
По окончании расчета будет автоматически запущен постпроцессор, в котором отобразятся результаты в виде заданного пользователем графика/графиков, настроенных в компоненте DISP.
Обработка и вывод результатов
Назначение постпроцессора
Постпроцессор PRADIS обеспечивает визуализацию и анализ результатов математического моделирования, позволяя представлять данные в виде графиков, диаграмм и выводить их на внешние устройства.
Постпроцессор PRADIS предоставляет следующий набор функций для работы с результатами моделирования:
Построение графиков и фазовых диаграмм: обеспечивает построение двумерных графиков зависимости выходных переменных от времени и фазовых диаграмм. Результаты также доступны для просмотра в виде таблиц численных значений с возможностью экспорта в табличные процессоры.
3D-анимация процессов: предназначен для анимации результатов моделирования как в реальном, так и в модельном масштабе времени. Поддерживает создание пользовательских графических элементов для анимации и экспорт видеороликов.
Генерация отчетов: модуль генерации отчетов значительно сокращает время на создание итоговых документов по результатам анализа.
Гибкие настройки визуализации: обеспечивают выбор отображаемых кривых, изменение цветов и толщины линий, настройка фона диаграмм и масштабирование.
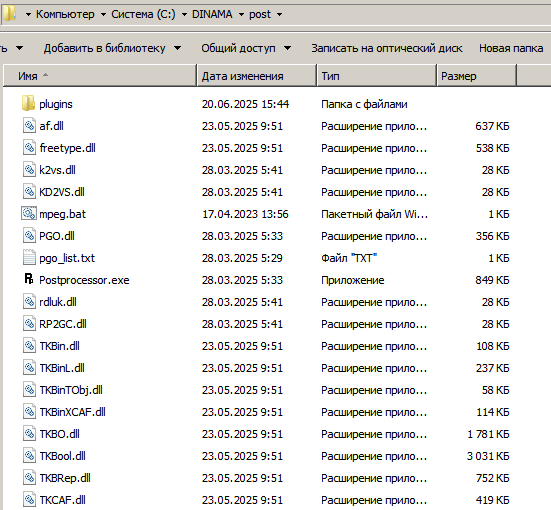
Запуск построцессора
Запуск постпроцессора осуществляется двойным щелчком мыши по иконке post на рабочем столе (рисунок 15):

Рисунок 15. Иконка постпроцессора
или с помощью файла postprocessor.exe, находящегося в папке DINAMA\post\ (рисунок 16):
Отображение результатов в виде графиков 2D
Окно постпроцессора с результатами расчета математической модели, заданной пользователем, открывается автоматически по окончании расчета (рисунок 17):
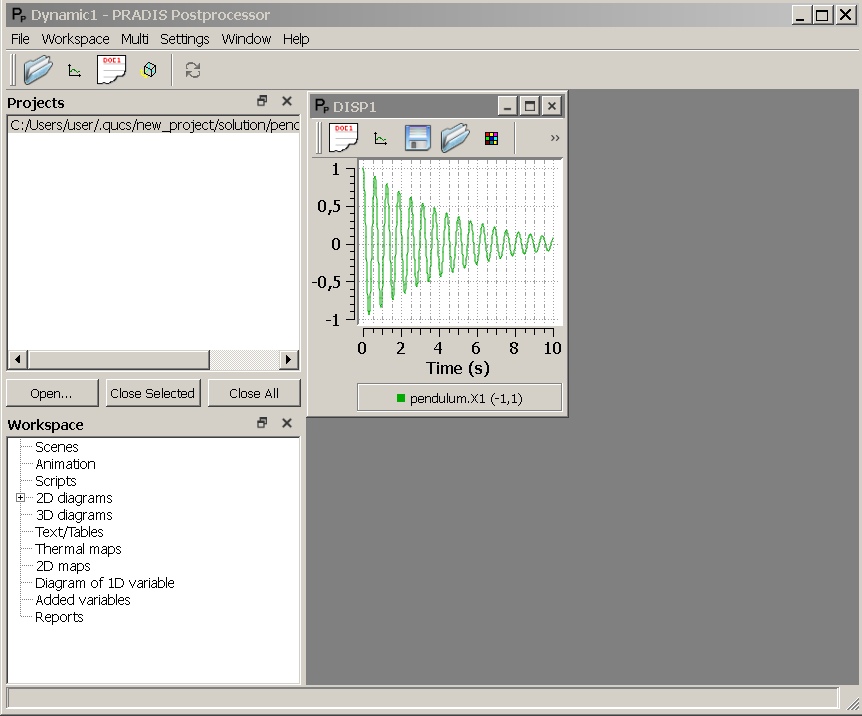
Рисунок 17. Окно постпроцессора с результатами расчета
На рисунке 17 приведен пример настройки DISP, при котором формируется один график, отображающий зависимость перемещения (индикатор X1) от времени. На оси Y отображается диапазон изменения перемещения, заданный при настройке компонента DISP для индикатора Х1 (рисунок 12). На оси X отображается разметка до значения конечного времени интегрирования, заданного параметром end=10, при настройке компонента Dynamic.
Подробное описание функционала окна постпроцессора приведено здесь.
На рисунке 18 приведен пример настройки DISP, при котором формируется два графика в одном окне: зависимость изменения перемещения от времени и зависимость изменения скорости груза от времени:
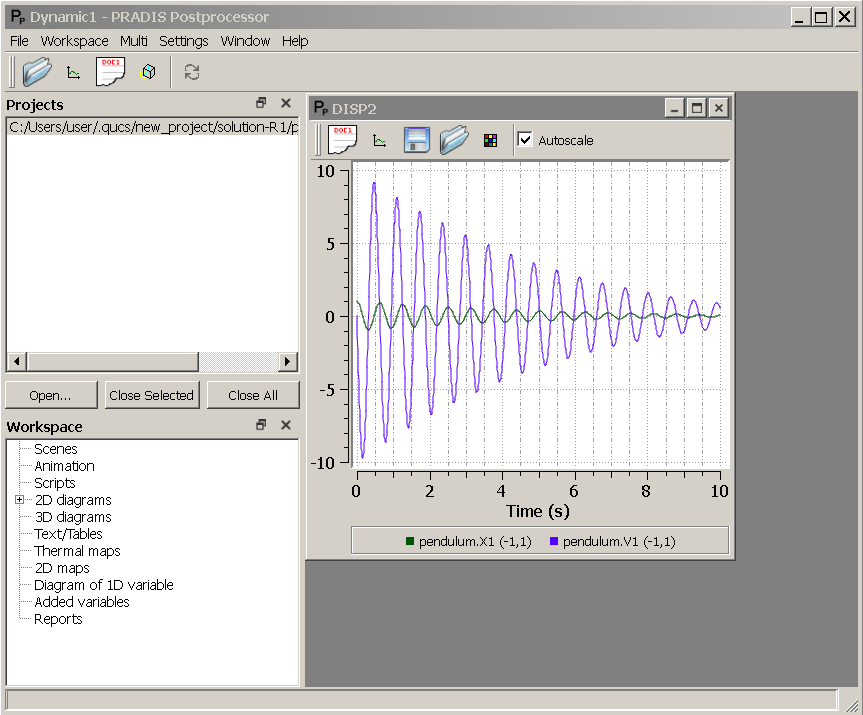
Рисунок 18
Для отображения зависимости силы от времени используем другой способ отображения результатов расчета в виде графика.
На панели инструментов окна DISP2 необходимо выбрать и нажать на значок
 , откроется окно с настройками отображения графиков (DISP2):
, откроется окно с настройками отображения графиков (DISP2):
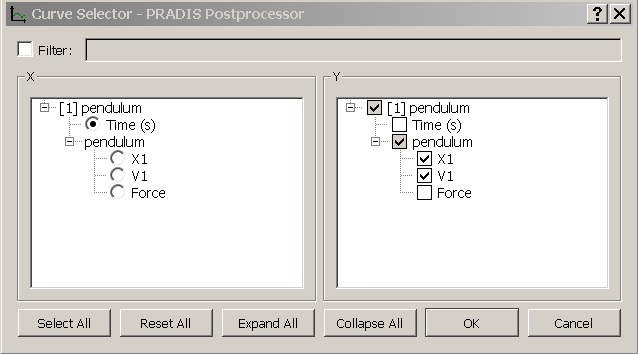
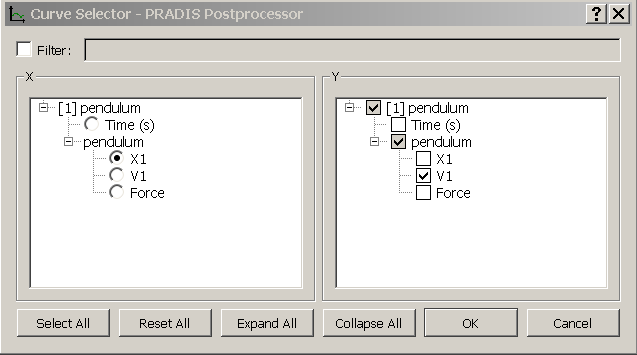
На левой панели расположены настройки оси X, на правой — оси Y. Для построения графика зависимости силы от времени установите флажок «Force» как показано на рисунке 20.
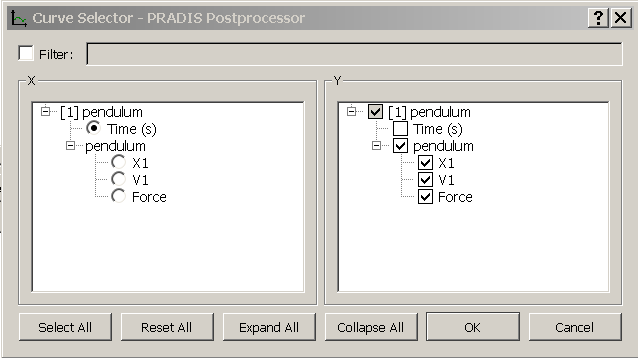
Рисунок 20
Таким образом, к существующим графиками добавится график, отображающий зависимость изменения силы пружины от времени (рисунок 21):
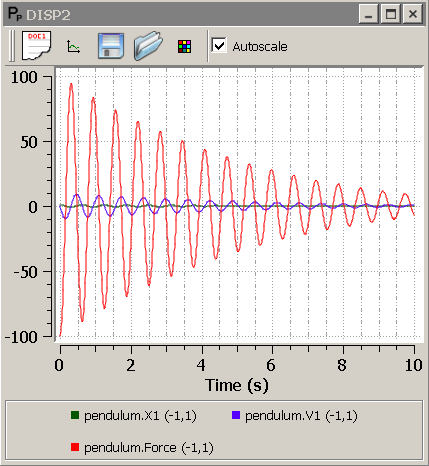
Рисунок 21
Отображение результатов в виде фазовых портретов (диаграмм)
Фазовый портрет пружинного маятника — это график, показывающий все возможные движения системы в виде фазовых траекторий на фазовой плоскости (оси: координата (смещение от положения равновесия) и скорость). Этот портрет позволяет визуально понять, как изменяется система со временем при различных начальных условиях: замкнутые траектории соответствуют колебаниям (без затухания), а разомкнутые — вращению (при наличии начальной скорости, превышающей определённый порог).
Для построения фазового портрета пружинного маятника, приведенного на рисунке 22:
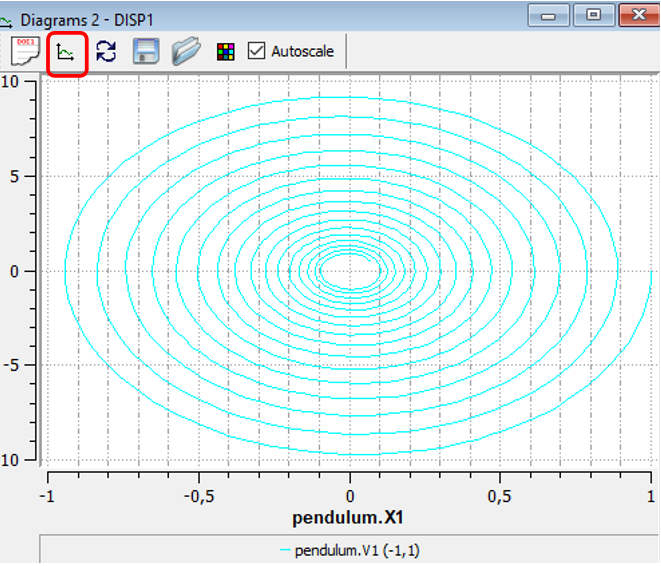
Рисунок 22. Фазовый портрет
необходимо в окне «Curve Selector – PRADIS Postprocessor» выбрать следующие настройки (рисунок 23):