Модель: DCM
Библиотека: Electronics
Имя на уровне решателя: DCM
Аннотация: Двигатель постоянного тока
Обозначение: 
№ |
Обозначение порта |
Тип |
Наименование порта |
|---|---|---|---|
1 |
Port1 |
base.DOF1 |
Электрический порт 1 положительного полюса обмотки якоря |
2 |
Port2 |
base.DOF1 |
Электрический порт 2 отрицательного полюса обмотки якоря |
3 |
Port3 |
base.DOF1 |
1D механический порт 1, передающий крутящий момент на вал |
4 |
Port4 |
base.DOF1 |
1D механический порт 2, передающий крутящий момент на крепление корпуса |
5 |
Port5 |
base.DOF1 |
Тепловой порт 1, задающий тепловые условия процесса |
№ |
Параметр |
Тип |
Описание |
Значение по умолч. |
|---|---|---|---|---|
1 |
Ct |
base.real |
Теплоемкость двигателя, Дж*с/К |
100 |
2 |
Jrot |
base.real |
Момент инерции ротора, кг*м^2 |
1e-2 |
3 |
Jst |
base.real |
Момент инерции статора, кг*м^2 |
1e-2 |
4 |
Ke |
base.real |
Постоянная ЭДС, В*с/рад (при согласованных единицах измерения Km=Ke) |
1 |
5 |
Km |
base.real |
Постоянная момента, Н*м/А |
1 |
6 |
Ktr |
base.real |
Коэффициент трения в подшипниках, Н*м*с/рад |
1e-3 |
7 |
L |
base.real |
Индуктивность обмоток, Гн |
1e-4 |
8 |
R |
base.real |
Сопротивление обмоток, Ом |
1 |
Результаты тестирования
www.laduga.com
Глава 1. Заданные параметры теста
Название тестируемого компонента
DCM
Модуль тестируемого компонента
Electronics
Дата тестирования
Tue Mar 3 18:48:57 2026
Результат
OK
Глава 2. Схема тестируемого объекта
Двигатель постоянного тока (ДПТ). Проверка пускового режима и установившегося состояния.
Описание устройства
Двигатель постоянного тока (ДПТ) — это электрическая машина, преобразующая энергию постоянного тока в механическую энергию вращения. ДПТ широко применяются в электроприводах, требующих плавного регулирования частоты вращения и большого пускового момента.
Основные области применения:
Электроприводы станков и механизмов
Тяговые двигатели электротранспорта
Робототехника и сервоприводы
Системы автоматики и позиционирования
Параметры двигателя и их физический смысл
- Сопротивление обмоток R
Электрическое сопротивление проводников обмоток двигателя при номинальной температуре. Определяет нагрев обмоток и падение напряжения.
Примечание: Значение зависит от температуры обмоток и увеличивается при нагреве.
- Индуктивность обмоток L
Параметр, характеризующий способность обмоток двигателя накапливать энергию магнитного поля при протекании электрического тока.
Примечание: Индуктивность может изменяться в зависимости от режима работы и степени насыщения магнитной системы.
- Постоянная момента Kₘ (Kt)
Коэффициент пропорциональности между током якоря и электромагнитным моментом, развиваемым двигателем: \(M = K_t \cdot I\).
Примечание: При постоянном магнитном потоке считается неизменной в рабочем диапазоне.
- Постоянная противо-ЭДС Kₑ (Ke)
Коэффициент пропорциональности между угловой скоростью вращения ротора и величиной индуцируемой противо-электродвижущей силы: \(E = K_e \cdot \omega\).
Примечание: В системе СИ численно равна постоянной момента (при идеальных условиях).
- Момент инерции ротора J_rot
Механическая характеристика, определяющая сопротивление ротора изменению угловой скорости вращения.
Примечание: Учитывает массу и распределение массы всех вращающихся частей ротора и вала.
- Момент инерции статора J_st
Момент инерции неподвижной части двигателя относительно оси вращения.
Примечание: В стандартных стационарных условиях на динамику двигателя не влияет (учитывается для специальных случаев, например, при подвижном основании).
- Коэффициент трения в подшипниках K_tr
Параметр, характеризующий механическое сопротивление вращению, обусловленное трением в подшипниковых узлах.
Примечание: Может включать постоянную составляющую и составляющую, зависящую от скорости вращения.
- Теплоёмкость двигателя C_t
Физическая величина, характеризующая способность двигателя накапливать тепловую энергию.
Примечание: Определяется конструкцией, массой и материалами двигателя.
Описание схемы
Схема тестирования состоит из электрической и механической частей.
Электрическая часть:
Источник ЭДС E1 = 10 В — питание двигателя
Датчик тока SNSIE1 — контроль тока якоря
Механическая часть:
Закрепленный статор — неподвижная часть двигателя
Подвижный ротор — вращающаяся часть
Датчик Speed — контроль угловой скорости вращения
Нагрузка SF1D1 = -1 — механическая нагрузка на валу (отрицательное значение указывает на тормозной характер нагрузки)
Математическая модель двигателя
Работа ДПТ описывается системой дифференциальных уравнений:
1. Электрическое уравнение (уравнение равновесия ЭДС):
где:
\(U\) — напряжение питания
\(R \cdot I\) — падение напряжения на активном сопротивлении
\(L \cdot dI/dt\) — ЭДС самоиндукции
\(K_e \cdot \omega\) — противо-ЭДС, индуцируемая вращением ротора
2. Механическое уравнение (уравнение движения):
где:
\(J = J_{rot}\) — момент инерции ротора
\(K_t \cdot I\) — электромагнитный момент двигателя
\(M_н\) — момент нагрузки (SF1D1)
\(b \cdot \omega\) — момент сопротивления от трения (\(b = K_{tr}\))
Исходные данные
Параметры двигателя DCM1:
E (напряжение питания) = 10 В
R (сопротивление обмоток) = 1 Ом
L (индуктивность обмоток) = 1×10⁻⁴ Гн
Kₘ (Kt) (постоянная момента) = 1 Н·м/А
Kₑ (Ke) (постоянная противо-ЭДС) = 1 В·с/рад
J_rot (момент инерции ротора) = 1×10⁻² кг·м²
J_st (момент инерции статора) = 1 кг·м² (не влияет на динамику)
K_tr (коэффициент трения) = 1×10⁻³ Н·м·с/рад
C_t (теплоёмкость) = 100 Дж/К
SF1D1 (момент нагрузки) = -1 Н·м (отрицательный знак указывает на тормозной характер нагрузки, противодействующей вращению)
Анализ пускового режима (t = 0)
В момент пуска двигатель неподвижен:
Противо-ЭДС отсутствует:
Электрическое уравнение упрощается (пренебрегаем индуктивностью в начальный момент или рассматриваем установившийся пусковой ток):
Отсюда пусковой ток:
Пусковой момент:
Пусковой ток значительно превышает номинальный, что характерно для ДПТ.
Анализ установившегося режима (t → ∞)
В установившемся режиме производные равны нулю:
Электрическое уравнение принимает вид:
Выражаем ток:
Механическое уравнение принимает вид:
Подставляем значения:
Учитывая, что M_н = SF1D1 = -1 Н·м (торможение):
Обратите внимание: отрицательный момент нагрузки означает, что нагрузка помогает вращению (двигатель работает в тормозном режиме или нагрузка имеет активный характер). В данном случае, вероятно, знак «минус» указывает на направление, и по модулю нагрузка составляет 1 Н·м, поэтому используем \(M_н = 1\) с соответствующим знаком в уравнении.
Корректная запись с учетом направления:
Решение системы уравнений
Имеем систему:
Приравниваем правые части:
Переносим члены с ω в одну сторону:
Находим ток:
Установившийся режим: * Угловая скорость: ω ≈ 8.99 рад/с * Ток якоря: I ≈ 1.01 А
Оценка времени переходного процесса
Постоянная времени электрической цепи:
Постоянная времени механической системы:
Результирующее время переходного процесса определяется большей постоянной времени, но с учетом электромеханической связи. В данном случае переходной процесс составляет примерно 0.1 с (как указано в задании).
Ожидаемые осциллограммы
Ток якоря I(t): * В момент пуска: скачок до 10 А * Далее экспоненциальное снижение до 1.01 А * Длительность переходного процесса ≈ 0.1 с
Угловая скорость ω(t): * Начальное значение: 0 рад/с * Плавное нарастание по экспоненте до 8.99 рад/с * Выход на установившийся режим ≈ 0.1 с
Момент двигателя M(t): * Пусковой момент: 10 Н·м * Установившийся момент: 1.01 Н·м (уравновешивает нагрузку и трение)
Схема теста
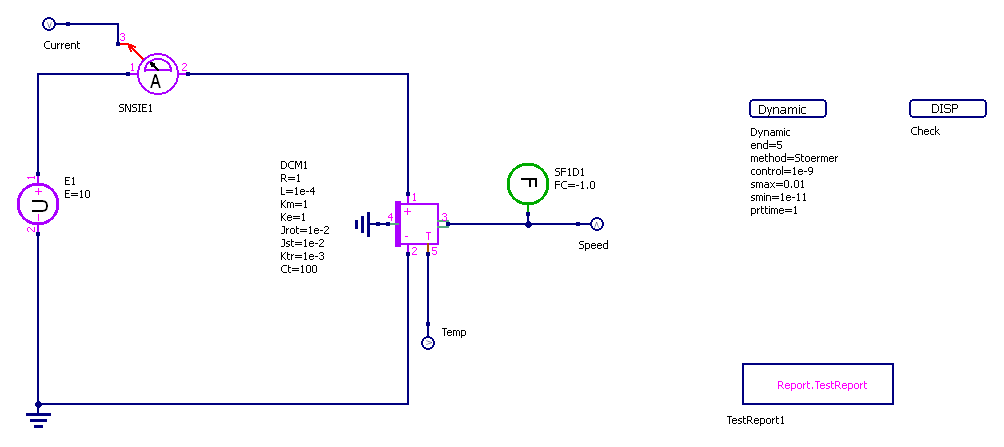
Рисунок 1 — Схема тестирования двигателя постоянного тока (ДПТ)
Глава 3. Графики результатов теста
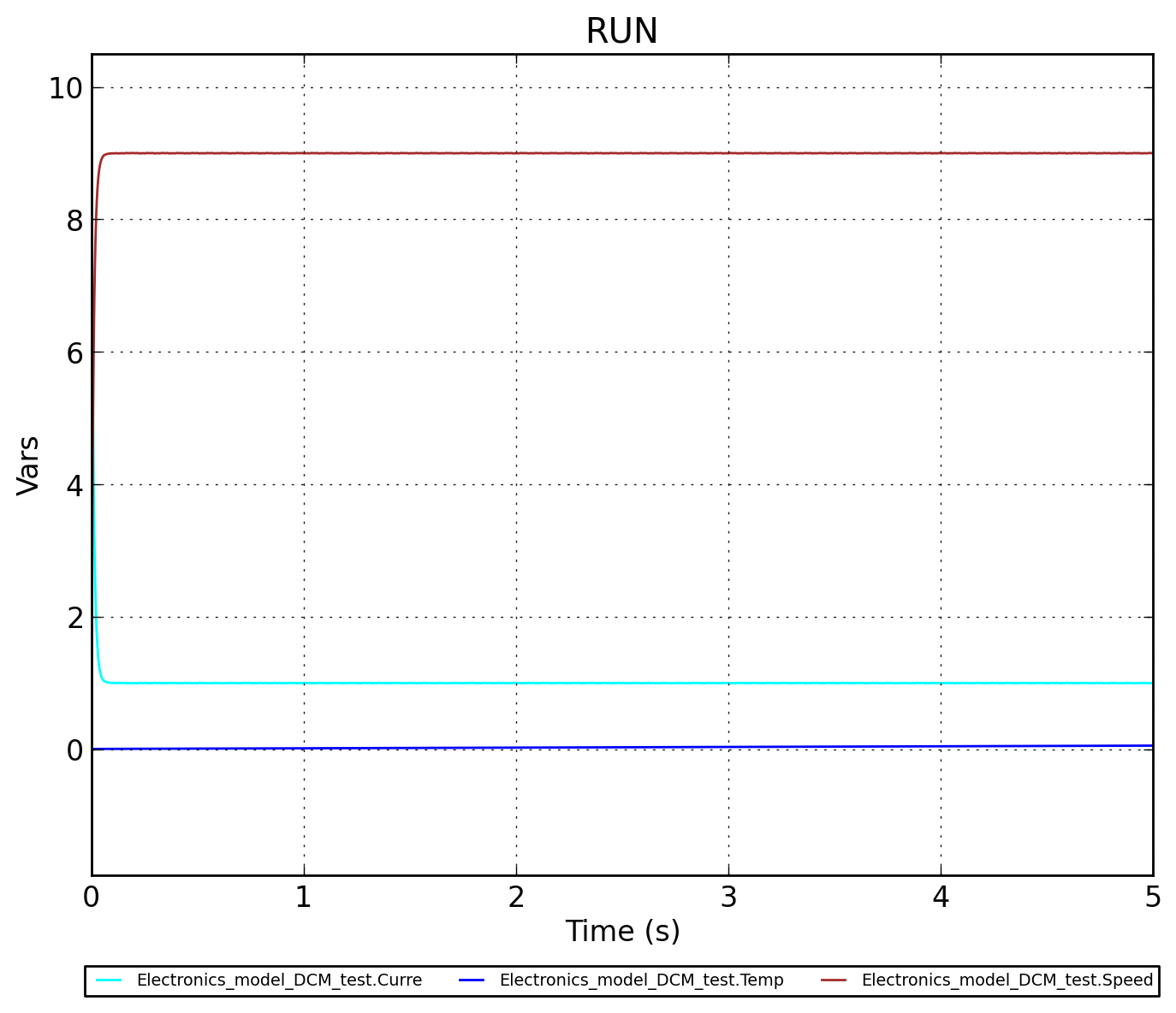
Рисунок 2 - Electronics_model_DCM.RUN
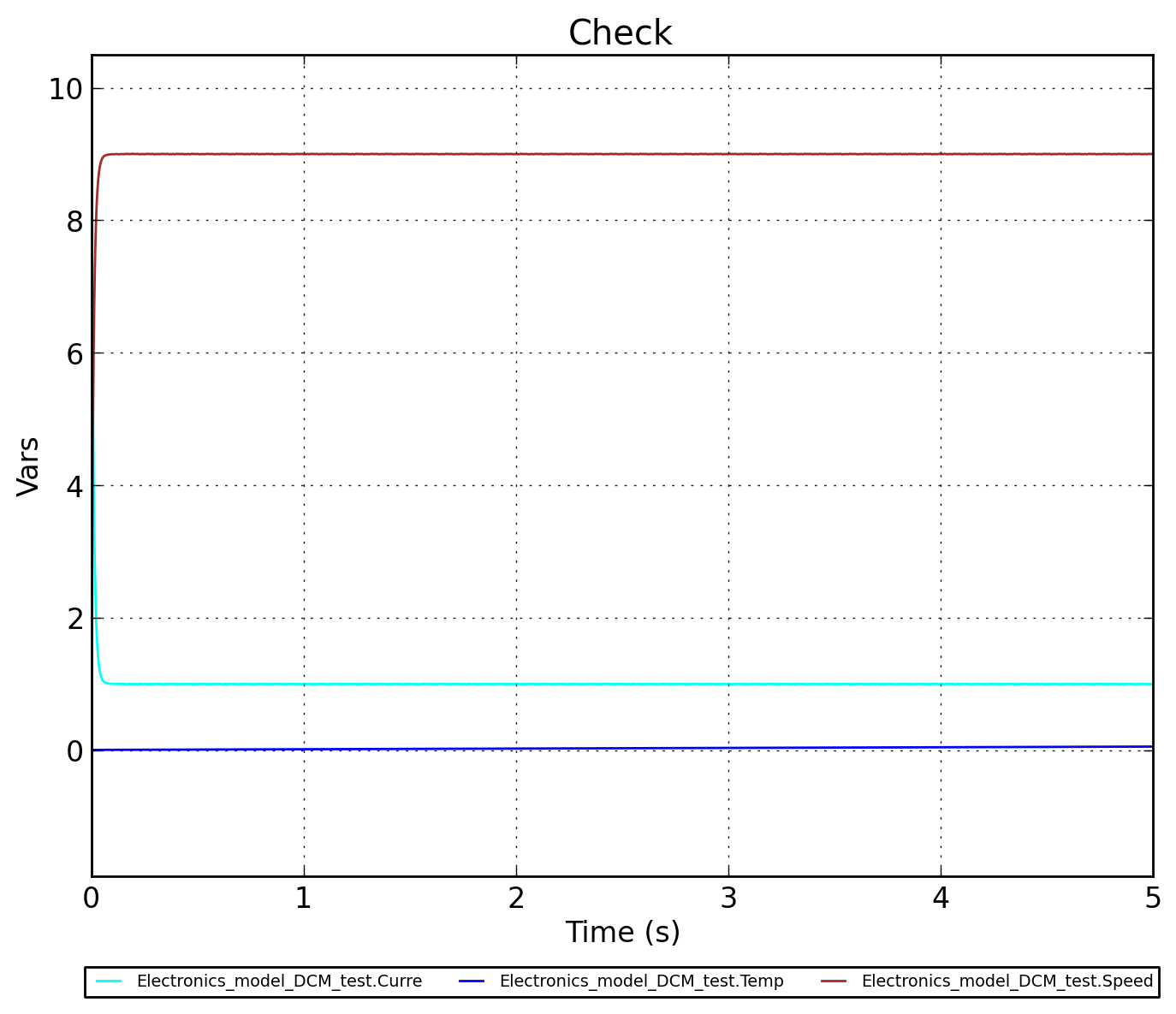
Рисунок 3 - Electronics_model_DCM.Check